2.2.3 推算計算結果の検討
予測水深の残差(=[予測水深]-[観測水深])とその標準偏差についてG1405付近の場合をまとめると下記のようになる。
| |
平均水深(m) |
標準偏差 |
残差(観測水深との差)の標準偏差(m) |
| 予測水深 |
4184.5 |
945.6 |
294.0 |
参考までに、補正済み予測水深についても予測水深と同様の手順で観測水深との残差をとった場合について検討した。
| |
平均水深(m) |
標準偏差 |
残差(観測水深との差)の標準偏差(m) |
| 補正済み予測水深 |
4189.5 |
1029.6 |
11.2 |
残差埋め戻しによる補正が残差の標準偏差を顕著に改善しており、観測水深データの値を反映するのに有効である事が確認できた。
(2)ロウパスフィルター処理時のパラメーターに関する試行
残差埋め戻し補正を行った段階での予測水深点データから直接等深線を作成すると非常に煩雑で不自然な描画になり、非実用的である。そこで、ロウパスフィルターによって整形処理をほどこすことにより無意味な情報を抑制する。(ロウパスフィルター処理の前にはあらかじめ陸地標高データを埋め込んでおく。)
本研究で用いるバンドパスフィルター及び下方接続処理のインパルスレスポンス(
図2-10)の形から、水平方向解像度は10km程度であることが読み取れる。また、1分間隔データの作成であることから、ナイキスト周波数はメッシュ2個分=2分、約4kmとなる。以上の考察から、整形用ロウパスフィルターのパス波長、カットオフ波長をそれぞれ14km、10kmとした。また、数種類のパラメーターについて試行錯誤を行い、パス波長=14km、カットオフ波長=10kmの妥当性を検討した。
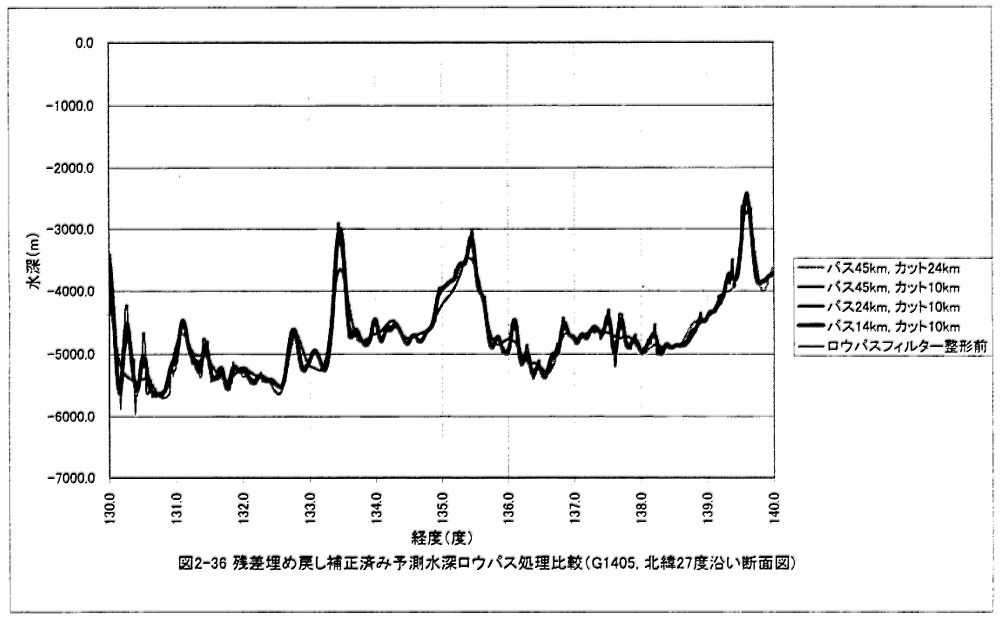
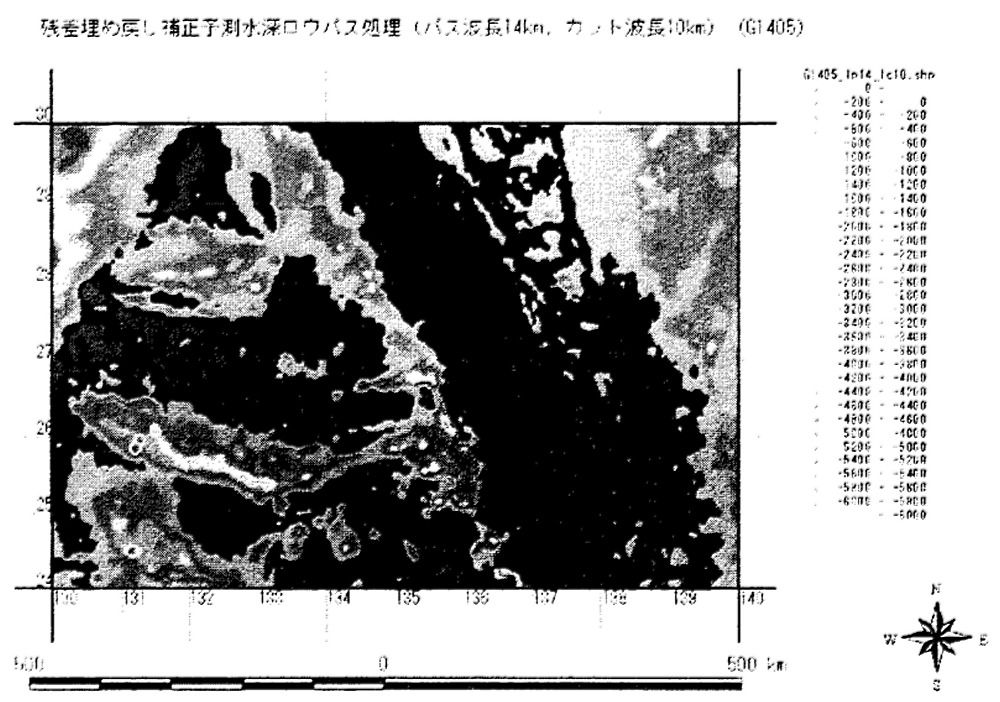
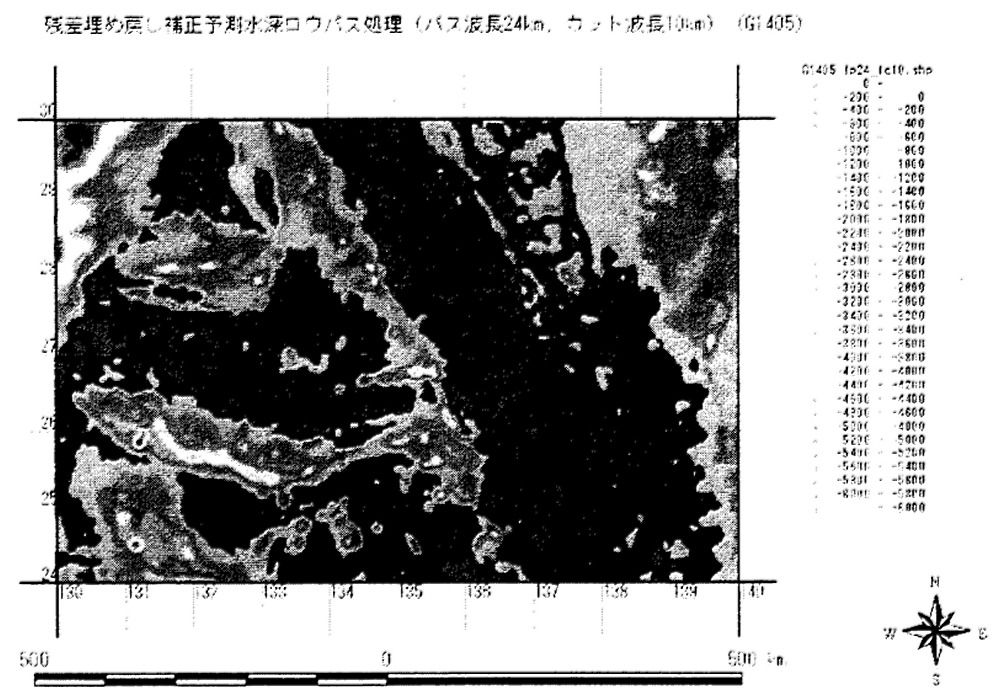
モデル海域(G1405)におけるロウパスフィルター整形処理の試行結果を図2-36及び図2-37(1)〜(4)に示す。
(拡大画面: 68 KB)
|
図2-36 残差埋め戻し補正済み予測水深ロウパス処理比較(G1405,北緯27度沿い断面図) |
(拡大画面: 128 KB)
|
図2-37(1) 残差埋め戻し補正済み予測水深ロウバス処理(パス波長14km、カット波長10km) |
(拡大画面: 130 KB)
|
図2-37(2) 残差埋め戻し補正済み予測水深ロウパス処理(パス波長24km、カット波長10km) |