1.まえがき
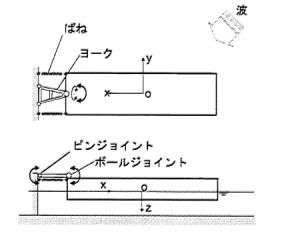
浮体式石油生産設備、貯蔵設備の一点係留システムとして実用されているヨーク係留装置を浮桟橋の係留方式として採用する場合の実用性を検討した。ヨーク係留装置は係留ブイと船体とが、ヨーク(Ybke、くびき)と呼ばれる三角形(A字型)の平面トラス構造によって連結されているものである。ヨーク係留装置の概念図を図1.1に示す。
図1.1 ヨーク係留装置のコンセプト
2.水槽実験によるヨーク係留装置の実用性検証
2.1 実験方法
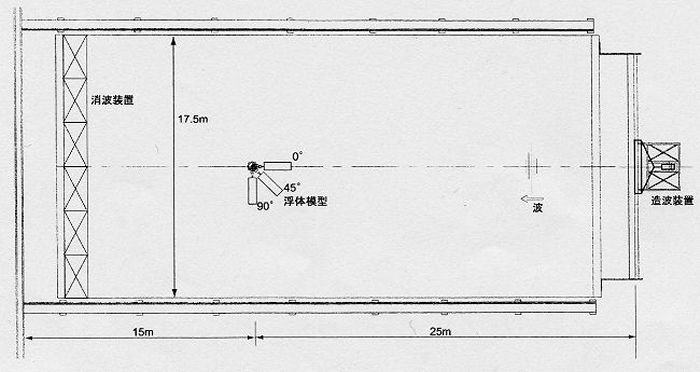
実験は規則波及び不規則波を各波方向(0°、45。、90°)にて浮体に作用させ、浮体の運動、加速度、ヨーク及びばねの係留力等を計測した。実験水槽には三菱重工業(株)長崎研究所の浅水域水槽(L×B=40m×17.5m)を使用し、供試模型の縮率は水槽の造波能力及び計測精度等を考慮して1/20とした。図2.1に水槽内での模型配置状況を示す。
(拡大画面: 41 KB)
図2.1 実験水槽
(1) 浮体模型
コンクリート比重(γ)の異なる3つのケースを想定し、表2.1のように浮体要目を設定した。γ=1.5t/m3の場合をCase2として代表状態とする。Case1、Case3については喫水影響について調査するため、一部の条件下での実験を行った。
表2.1 浮体模型の主要目
模型縮率 1/S=1/20、√S=4.472
| |
Case1
γ=2.3t/m3 |
Case2
γ=1.5t/m3 |
Case3
γ=1.2t/m3 |
| 実機 |
模型 |
実機 |
模型 |
実機 |
模型 |
| 長さL |
35.0m |
1.75m |
35.0m |
1.75m |
35.0m |
1.75m |
| 幅B |
10.0m |
0.5m |
10.0m |
0.5m |
10.0m |
0.5m |
| 喫水d |
1.4m |
70.0mm |
1.1m |
55.0mm |
0.9m |
45.0mm |
| 排水量△ |
502ton |
61.2kg |
395ton |
48.2kg |
323ton |
39.4kg |
| 重心高さKG |
1.19m |
59.5mm |
1.23m |
61.5mm |
1.37m |
68.5mm |
| メタセンタ高さGM |
5.46m |
273mm |
6.90m |
345mm |
8.34m |
417mm |
| 慣動半径 |
Kxx/B |
0.339 |
0.339 |
0.341 |
0.341 |
0.347 |
0.347 |
| Kyy/L |
0.25 |
0.25 |
0.25 |
0.25 |
0.25 |
0.25 |
| Kzz/L |
0.25 |
0.25 |
0.25 |
0.25 |
0.25 |
0.25 |
(2) 係留装置模型
係留装置としてのヨーク装置及び係留ばね装置は、係留ばねをチェーン係留で置き換えることも可能であるなど、想定実機としていくつかの形態が考えられる。ここでは、ばね特性はスプリングで模型化し、その基本的特性が直接模擬できるようにした。
(a) ヨーク係留装置
・係留連結点の自由度
| 陸側;ビンジョイント |
:Pitch 方向回転自由 |
| 浮体側;ボールジョイント |
:3軸回転自由 |
・軸間長さ15m (模型寸法0.75m)
・ヨーク部重量 6ton (模型重量0.73kg)
(b) ばね係留装置
・ばね定数 100kN/m (模型寸法0.025kg/mm)
・初期張力 100kN (模型寸法1.25kg)
(3) 実験条件
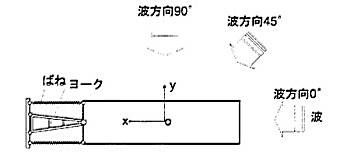
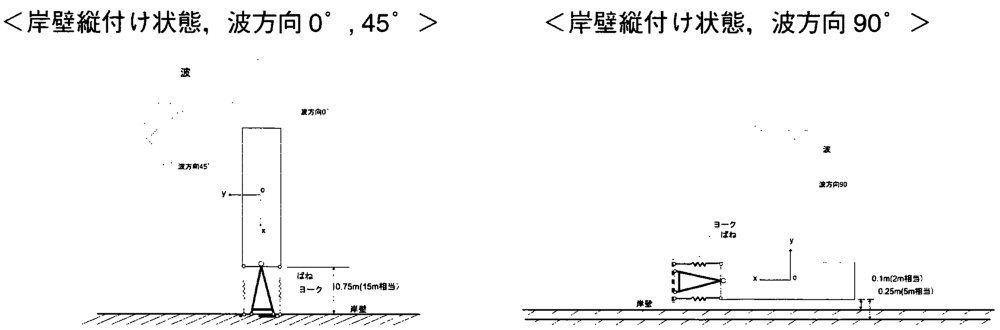
規則波中及び不規則波中での実験を行った。規則波は基本性能を把握するため常時対応の波高0.5mとし、不規則波は異常時対応の有義波高1.0mとした。不規則波の波スペクトルはBretschneider−光易型を用いた。波方向影響を調査のため、図2.2に示すように波方向0、45、90degについて実験を行った。岸壁無しの状態を基本としたが、岸壁がある場合についても一部実験を行い、岸壁影響によって運動係留力が増加する影響を調査した。岸壁は基本的な直立岸壁を想定した。岸壁の反射係数の実測値はほぼ0.8である。図2.3に各波方向における岸壁の設置位置と浮体と岸壁間距離の定義を示す。また、岸壁での反射波が浮体模型全体に、作用するように十分にとった。
表2.2 波浪条件
| 規則波 |
| |
実機 |
模型 |
| 波高 Hw |
0.5m |
25mm |
| 波周期 Tw |
3.5〜12.0s |
0.78〜2.68sec |
| 波方向 μ |
0,45,90deg |
| 不規則波 |
| |
実機 |
模型 |
| 有義波高 H1/3 |
1.0m |
50mm |
| 有義波周期 T1/3 |
4.0, 6.0, 8.0s |
0.89, 1.34, 1.79s |
| 波方向 μ |
0,45,90deg |
表2.3 水深条件
表2.4 岸壁条件
| 波方向 |
浮体と岸壁との
位置関係 |
岸壁と浮体間の距離* |
備考 |
| 実機 |
模型 |
| 0, 45 ,90deg |
岸壁無し |
|
| 0deg |
岸壁に縦付け状態 |
15m |
0.75m |
*岸壁と浮体前端部との距離 |
| 45deg |
15m |
0.75m |
| 90deg |
岸壁に横付け状態 |
2m |
0.10m |
*岸壁と浮体舷側との距離 |
| 5m |
0.25m |
図2.2 模型配置と波方向の関係
(拡大画面: 29 KB)
図2.3 浮体と岸壁との関係
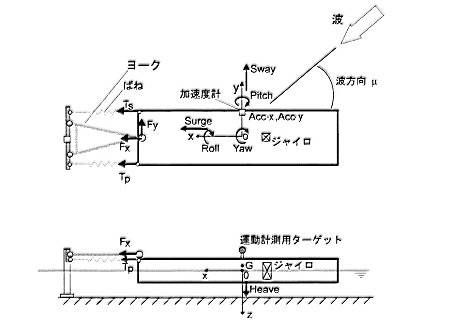
(4) 計測内容
運動、係留力の評価ができるように、表2.5の各計測を行った。図2.4に計測位置の関係図を示す。
表2.5 計測項目一覧表
| ch |
計測項目 |
記号 |
計測機器 |
| 1 |
入射波 |
Hw |
抵抗型波高計 |
| 2 |
Sway |
Sway |
非接触運動計測装置
(重心G点運動) |
| 3 |
Heave |
Heave |
| 4 |
Roll |
Roll |
ジャイロ |
| 5 |
Pitch |
Pitch |
| 6 |
Yaw |
Yaw |
| 7 |
デッキ上加速度(y方向) |
Acc.y |
加速度変換器 |
| 8 |
デッキ上加速度(z方向) |
Acc.z |
| 9 |
ヨーク係留力(x方向) |
Fx |
ブロックゲージ型ロードセル |
| 10 |
ヨーク係留力(y方向) |
Fy |
| 11 |
ばね係留力(右舷側) |
Ts |
1軸ロードセル(張力計) |
| 12 |
ばね係留力(左舷側) |
Tp |
図2.4 計測装置状況図