|
4.4 結果:ミッション1
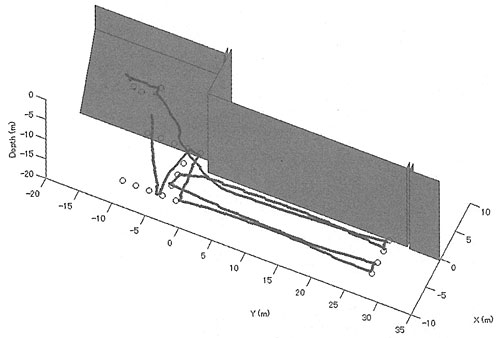
| Fig. 11 |
Estimated trajectory of the vehicle (Mission 1). |
| Fig. 12 |
Standard deviation of holizontal position (Mission 1). |
| Fig. 13 |
Estimated heading and standard deviation (Mission 1). |
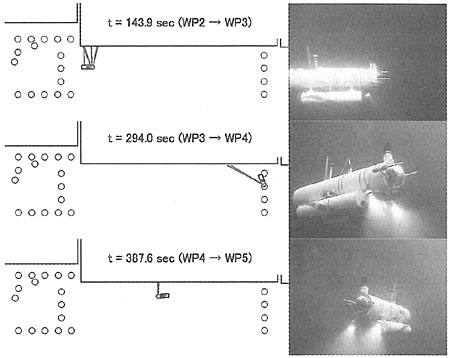
| Fig. 14 |
Estimated state and perceptional measurements (Mission 1). |
実験中リアルタイムに推定された航跡をFig. 11に示す。W12を通過した直後に高度が0.5m以下の状態が続いたため、自動的にミッションを中止して浮上した。自律航行による観測距離は約166m、時間は17分29秒であった。Fig. 14は実験中に推定された自己位置、環境センサの計測値を環境マップに重ねてプロットしたものであり、同時刻にダイバーによって撮影された画像を右に示す。ロボット位置の内部に散乱する点はパーティクルフィルタの各標本siを示しており、これを平均化したものが自己位置となる。
推定された水平位置の標準偏差及び通過した航路点数をFig. 12に示す。X方向の標準偏差は0.05〜0.15mで安定して推移している。w2からw3にかけて0.05m程度まで収束しているのはLSが有効であったためである。壁面までの距離を1.5mとすると、(12)式に示した各センサの標準偏差は(18)〜(20)式からそれぞれ0.57m(OA)、0.54m(PS)、0.52m(LS)となり差は小さいが、観測の尤度は(8)式のように各観測直の尤度の積となるため、有効な観測点数が増えれば指数関数的に収束がよくなる。LSは最大10点の同時観測が可能であり、本区間においてはLSの影響が支配的であったことがわかる。Y方向の標準偏差が0.1〜0.4m程度とX方向に比べて大きいのは、Y方向の位置基準となる壁面が22番ケーソンの両側面に限られるためである。このためケーソン中央部を航行中は標準偏差が0.2m以上まで増加し、端部に到達すると急激に収束するという傾向が伺える。機首方位の標準偏差はFig. 13に示すように、ミッション全体を通して約1〜2degと安定して推移している。これらの標準偏差はパーティクルフィルタの標本分布についてであり、実際の測位精度を証明するものではない。しかしながら水中で、しかも構造物周辺における信頼性の高い測立手法はほとんど存在しないため、測位精度については上記の標準偏差と次に示すモザイク画像によっておおよその目安を示すにとどめる。
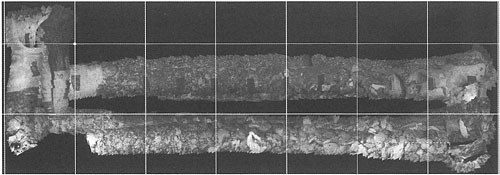
| Fig. 15 |
Mosaic image of foot protection blocks and rock mound. A 5m × 5m grid has been superimposed on the mosaic with the origin marked. |
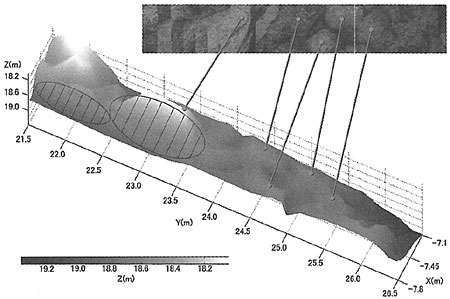
Fig. 15はCam3の画像から作成した海底面のモザイク画像であり、5mのグリッドを重ねて示す。図中左上の白点はFig. 9に示した環境マップの原点に対応する。作成には推定された位置・方位・姿勢・高度データのみを用い、画像の相関は一切用いていない。Fig. 12から示唆されるように位置精度は場所によって異なるが、誤差の当然大きくなるスタート地点を除けば標準偏差は最大で0.4m程度であり、根固めブロック及び捨石マウンドの分布状況が詳細に捉えられている。回頭中に誤差が目立つ原因としては、測立誤差に加えてデータのタイミングのずれが考えられる。Fig. 16はシートレーザによる計測値を線形補完して作成した高度マップであり、範囲はFig. 15の右下の部分に点線で囲った通りである。捨石の細かな形状を確認することができる。ただし計測が一方向一パスであったため、画像処理の問題やオクルージョン(レーザが障害物によって遮られること)によって十分なサンプル数が得られなかった。図中の網掛け部分はサンプルの得られなかった領域であり、内挿されているために信頼性は低い。より信頼性の高い計測を行うためには、観測対象に合わせてレーザ出力、画像処理方法及び計測パスを調整する必要がある。
| Fig. 16 |
Bathymetry map of rock mound.
The coverage is shown on Fig. 15 by the dotted rectangle. |
|