|
4.5 結果:ミッション2
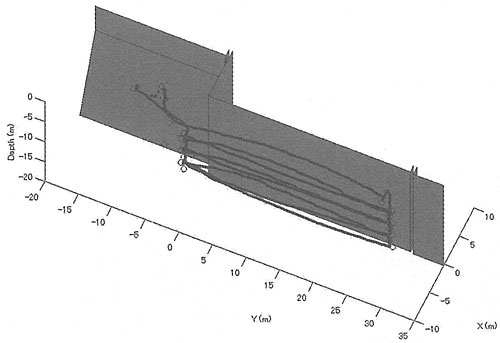
AUVはミッション開始から27分43秒で最後の航路点を通過し、ミッションを正常に終了した。Fig. 17は推定された航跡である。
水平位置及び機首方位の標準偏差をFig. 18、19に示す。ミッション1と同様の理由により、ケーソン壁面を左側に見ながら航行中(w4〜w5,w8〜w9,w12〜w13,w16〜w17)のX方向の標準偏差は0.05m程度まで収束しており、他の区間の0.1m〜0.15mと明確に異なる。
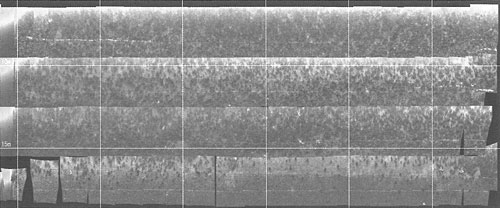
Cam2の画像から作成されたケーソン壁面のモザイク画像をFig. 20に示す。これはFig. 15と同様の方法で作成されたものであり、5mのグリッドを重ねて示す。各画像下部の輝線はシートレーザによるものである。左端の白線がケーソン端部、即ちY=0を表しており、観測結果との誤差はおよそ10cm〜20cmである。画像の相関を考慮していないにもかかわらず接合部が自然であり、ケーソン表面の健康状態と付着生物の分布状況が壁面全体に渡って詳細に示されている。この理由としては観測対象がFig. 15と違って単純な平面であったことも挙げられるが、本図によってAUVの状態推定及び行動制御がリアルタイムに精度よく行われたことが示された。
Fig. 17 Estimated trajectory of the AUV (Mission 2).
| Fig. 18 |
Standard deviation of holizontal position (Mission 2). |
| Fig. 19 |
Estimated heading and standard deviation (Mission 2). |
| Fig. 20 |
Mosaic image of the caisson's surface. A 5m × 5m grid has been superimposed with the depth indicated on the left. |
5. 実務への適用性
本実験において、提案手法を実装したAUV“Tri-Dog 1”は外部支援無しで安定した測立及び行動制御を行い、防波堤の完全自律観測に世界で初めて成功した。観測結果として得られたモザイク画像からは防波堤ケーソン表面及び根固めブロック、捨石マウンドの外観を詳細に観察可能であることから、測位性能は実用レベルに達していると判断できる。このような広範囲にわたるモザイク画像の生成は、測立の問題によって従来はほとんど不可能であった。以上のことから、本手法は形状があらかじめ分かっている海洋構造物などの観測ミッションに適用可能であり、水中構造物観測の新たな可能性を示すものであると結論する。
しかしながら、本実験によっていくつかの問題点が明らかとなった。第一は、絶対的な測位精度を検証することの難しさである。測位精度の検証には外部基準が必要となるが、構造物周辺では音響測位の精度が下がるため、外部環境にカメラを設置して画像によりAUVの位置を判断するなど工夫を必要とする。第二は、単一のセンサ誤差が測位に与える影響である。Fig. 13では機首方位が17秒ごとに1deg程度変動しているが、プロファイリングソーナーの回転周期と合致すること、光ファイバジャイロの計測値ではこのような変動が確認できないことから、この変動はプロファイリングソーナーの計測誤差によって引き起こされた測立誤差だと判断される。この問題はセンサフュージョンの弊害ともいえ完全に回避することは出来ないが、ソーナーの入射角、誤差を判別するためのパラメータの調整などによってある程度は軽減できると考える。第三は、予期せぬ高度変化や障害物に遭遇したときの脆弱性である。本実験では底面までの高度が小さくなるとミッションを中止するという安全策を用いたが、実用化するためには、回避経路の自動生成といったよりロバストなミッション遂行能力が求められる。また、環境地図の動的修正・追加やSLAM(Simultaneous Localization And Mapping)への発展も考えられる。
6. まとめ
本研究では、AUVが構造物周辺で観測活動を行うための手法として、センサフュージョンによる自律航法を提案した。岩手県の釜石湾口防波堤で行われた実海域実験において、本手法を実装したAUV“Tri-Dog 1”が防波堤の完全自律観測に成功し、ケーソン表面や根固めブロック、捨石マウンドの詳細な画像マッピングを行った。実験を通していくつかの課題が確認されたものの、提案手法の実海域における有効性が示された。この成果は水中構造物観測の新たな可能性を開くものとして、さまざまな分野への応用が期待される。
謝辞
本研究は(財)港湾空港建設技術サービスセンターからの研究助成を受けておこなわれました。実海域実験は(独)港湾空港技術研究所との共同研究の一部として行われました。実験を遂行するにあたり便宜を図っていただいた、国土交通省釜石港湾事務所の成田満所長、(独)港湾空港技術研究所の酒井浩氏、田中敏成氏、(株)東亜建設工業の加藤謙氏、神修氏、鈴木雅樹氏、岩本和之氏、(有)釜石海洋開発の大入禎介氏、東京大学海洋研究所国際沿岸海洋研究センターの乙部弘隆氏をはじめとする関係者の皆様に感謝いたします。なお、本研究は文部科学省科学研究費学術創生研究「深海知能ロボットの研究」の一環としておこなわれています。
参考文献
1)N.J. Elwood, C.W. Coviello and H.C. Scott IV: Commercial Engineer Divers: An Underwater Window, Sea Technology, Vol.45, No.12, pp.35-38, 2004.
2)R.Laytner: Diving for bombs, UNDERWATER CONTRACTOR International, Vol.8, No.6, pp.18-20, 2004.
3)C. Tarmey and R. Hallyburton : Seaeye ROV Uses CDL Inertial Navigation for Tunnel Survey, Sea Technology, Vol.45, No.12, pp.21-26, 2004.
4)T. Asai, J. Kojima, K. Asakawa and T. Iso: Inspection of submarinecable of over 400 km by AUV, Proc. of UT '00, pp.133-135, 2000.
5)H. Kondo, S. Yu and T. Ura : Object observation in detail by the AUV "Tri-Dog 1" with laser pointers, Proc. Oceans '01, pp.390-396, 2001.
6)H. Kondo, T. Ura. Y. Nose: Development of an Autonomous Underwater Vehicle " Tai-Dog 1" toward Practical Use in Shallow Water, Journal of Robotics and Mechatronics, Vol.13, No.2, pp.205-211, 2001.
7)H. Kondo, T. Maki, T. Ura, Y. Nose, T. Sakamaki and M. Inaishi : Structure Tracing with a Ranging System using a Sheet Laser Beam, Proc. of UT '04, pp.83-88, 2004.
8)H. Kondo, T. Maki, T. Ura, Y. Nose, T. Sakamaki and M. Inaishi: Relative Navigation of an AUV using a Light-Section Ranging System, Proc. of ICARCV '04, pp.425-430, 2004.
9)H. Kondo, T. Maki, T. Ura, T. Sakamaki and M. Inaishi: Relative Navigation of an AUV Using Image-and-Acoustic Based Profiling System, Proc. of OCEANS '04, pp.1330-1335, 2004.
10)巻俊宏, 近藤逸人, 浦環, 坂巻隆: パーティクルフィルタを用いた水中ロボットの自律航法, 生産研究, Vol.156, No.6, pp.13-17, 2004.
11)S. Thrun, D. Fox, W. Burgard and F. Dellaert: Robust Monte Carlo localization for mobile robots, Artificial Intelligence, Vol.128, pp.99-141, 2001.
12)M. Adams, Sen Zhang and Lihua Xie: Particle Filter based outdoor robot localization using natural features extracted from laser scanners, Proc. of ICRA '04, pp.1493-1498, 2004.
13)R. Karlsson and F. Gustafsson: Particle filter for underwater terrain navigation, Proc. of IEEE Workshop on Statistical Signal Processing, pp.526-529, 2003.
|