|
3. AUV “Tri-Dog 1”
本AUVは6基のスラスタによりサージ、スウェイ、ヒーブ、ヨーの4自由度の運動制御が可能である。Table 1にスペックを示す。
3.1 運動センサ
運動センサとしては対地速度を計測するドップラ式流速計(DVL: Doppler Velocity Log)と方位を計測する光ファイバジャイロ(FOG: Fiber Optical Gyro)を搭載しており、これらのセンサから移動量aが計算される。また、深度を計測する圧力計と姿勢(ロール、ピッチ)を計測するAHRS(Attitude Heading Reference System)を搭載しており、圧力計は深度制御に、AHRSは環境センサ及び観測機器の動揺補正に使用される。
3.2 環境センサ
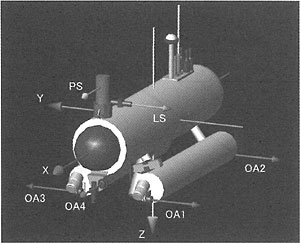
観測Oを得るための環境センサとしては、4台の障害物検知ソーナー(OA1〜OA4)と1台のプロファイリングソーナー(PS)、そして1台のシートレーザによる測距システム(LS)7, 8)を搭載している。Fig. 5に各センサの設置位置および計測方向を示す。
Fig. 5 Arrangement of perceptional sensors.
障害物検知ソーナーはビーム幅が±10degと広いためノイズが多いが、一台あたり4Hzで計測可能である。音波の周波数は175kHz、最大探知距離は25mであるが、ノイズの影響を抑えるために5m以上の計測直は無視する。プロファイリングソーナーは周波数675kHz、ビーム幅±1degの鋭い音響ビームを水平方向に360degスキャンするもので、AUVの全周にわたって計測を行うことができる。計測レンジは最大100mまでで可変であるが、計測周期と反比例の関係にあるため、実海域実験の規模を考慮して40mとする。2.4degステップで計測を行い、約17秒で一周する。なお、パーティクルフィルタの更新周期内に複数の観測が得られた場合、全て同時刻の観測であると見なす。
Fig. 6 Light Sectioning Method.
シートレーザによる測距システムはFig. 6のようにTVカメラとシートレーザによって構成され、光切断法によって対象物の断面形状を計測する。光学センサを使用するため最大探知距離は限られるが、ソーナーに比べて高分解能であり最大10点の同時計測が可能である。本AUVには左側方に一台、シートレーザ面が水平面となるように設置されており、約5Hzで計測を行う。最大探知距離は3mとするが、実際の探知可能距離は環境条件に依存する。分解能は対象までの距離が近いほど高く、対象までの距離が3mでは約5cmであるのに対し、1.4m以内であれば1cm以下になる。
状態推定部に用いる計測誤差σsはセンサ単体の分解能だけでなく、計測タイミングのずれなどAUV内部の全誤差要因を反映したものでなくてはならない。このため計測値dの関数として以下の式により実験的に定める。
3.3 観測機器
観測機器としては、NTSCカメラが前方(Cam1)と左側方(Cam2)に各1台、それから高解像度のデジタルカメラ(Cam3)が前方斜め下向きに一台設置される。Cam2は環境センサ(LS)を兼ねており、分解能を高めるために仰角20度で設置される。海底面の高度マッピングを行うためにシートレーザが一台、下方を向けて設置されており、その反射線はCam3の画像から後処理によって抽出される。各カメラの画像は静止画として一定周期で保存される。
4. 観測実験
4.1 実験場所
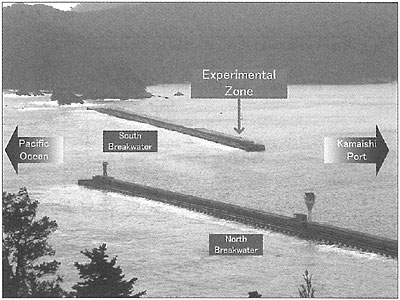
| Fig. 7 |
Experimental zone. Breakwarters at the mouth of Kamaishi bay. |
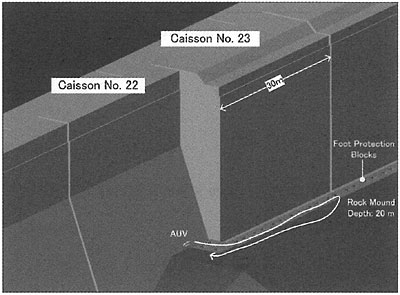
Fig. 8 Experimental setup.
実験場所はFig. 7に示すように、岩手県釜石市の釜石湾口防波堤南堤深部4区22番ケーソンから23番ケーソンにかけての港内側とする。Fig. 8のように水深20m程度まで捨石マウンドが築かれており、その上にコンクリート製のケーソンが設置されている。そして水平方向の大きさ5m×2.5mの根固めブロックが、ケーソンの基部に沿って縦一列に設置されている。防波堤の内側で行われたこともあって、実験中の波浪・潮流は非常に穏やかであった。
4.2 観測ミッション
Fig. 9 Way points for Mission 1: Bottom survey
Fig. 10 Way points for Mission 2: Wall survey.
実際の観測需要を踏まえ、底面観測と壁面観測の二種類のミッションを行う。各ミッションの観測経路WをそれぞれFigs.9、10の小円1〜20で示す。マップ座標系の原点及びXY軸の方向はFig. 9に示した通りである。航路点半径ωrは0.5mであり、図中の小円の半径と等しい。環境マップMは22、23、24番ケーソンの壁面とし、Fig. 9にM1〜M10の記号で示す。M1とM2を深度zの関数とすることで、22番ケーソンの斜面に対応させる。実海域の対象であることを考慮し、マップの誤差σmは0.5mと大きめに見積もる。なお、標本集合の初期値S0の分布は、水平位置は図中に大円で示したスタート地点((x, y)=(-1.0m,-7.0m))を中心とする標準偏差2mの2次元ガウス分布、機種方位はOdeg(X軸正方向)を中心とする標準偏差10degのガウス分布とする。
ミッション1(底面観測) 底面観測ミッションの目的は、根固めブロックと捨石マウンドの表面を広域にわたって画像観測することである。そこで、一定深度(17.5m)で海底面を幅広くカバーするように経路を設定する。Cam3の画像から後処理によりモザイク画像を作成するとともに、シートレーザによって深度マッピングを行う。経路の総延長はおよそ211mとなる。
ミッション2(壁面観測) 壁面観測ミッションでは、23番ケーソンの壁面の画像観測を行う。18m、15m、12m、9mという4段階の深度で22番ケーソンから一定距離(1.5m)離れて往復し、Cam2によりケーソン表面を撮影する。ただしCam2は左側に取り付けられているので、片道だけが観測に有効である。経路の総延長はおよそ298mとなる。
4.3 実験手順
無線LANによりスタート地点でX軸方向を向くように誘導されたAUVは、ミッション開始の指令とともに自律行動を開始する。AUVの喪失を防ぐためにダイバーの監視のもとで実験を行うが、潜航中は完全自律モードで行動する。全ての航路点を通過するか、あるいはミッション続行が不可能であるとAUVが判断したら浮上し、自律行動を終了する。安定した進路制御を行うために前進方向の最大速度は0.2m/sとし、パーティクルフィルタの標本数は500、更新周期は0.2秒とする。
|