|
平成15年度 論文賞
Active Motion Control Systemによる前翼制御
金沢工業大学
夢考房ソーラーボートプロジェクト
Golden Eagle
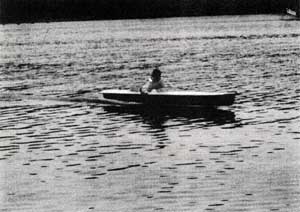
本研究において研究対象としているソーラーボートは、ソーラーパネルからの太陽エネルギーと、船に搭載されているバッテリからの限られたエネルギーを有効に使うために水中翼を使用している。水中翼は浮上する際に大きな抵抗がかかる代わりに、一旦浮上してしまえば排水量を用いた船よりも大幅に抵抗が減少するため、航続距離と速度共に向上させることが出来るのが大きな特徴である。そのため離水時間を短縮することで離水時にかかる抵抗を最小限にし、翼走時も前翼の姿勢を最適に保つことでエネルギーの消費を抑える。また不意な波などの外乱が起きても、バランスを崩して着水しないような制御を行なうことを目的としている。
今年作成した水面滑走板機構とAutomatic Motion Control System(以下AMCS)を2002年艇『Golden Eagle』に搭載し、海上自走試験を行なうことで姿勢制御システムを比較検討して、より良い船体姿勢制御システムの開発を行なうことを目的として活動している。
Fig.1 2002年度大会出場艇
2.1 船体姿勢制御システムの構成
ソーラーボートは、前後に2枚の水中翼を配置した全没水型逆T字翼で水中翼走を行っている。この2枚の水中翼で前部に取り付けられた翼を制御することで、離水及び翼走状態で必要な揚力を安定するように制御する。これにより艇体にかかる水の抵抗がなくなるので、走行状態の高速化と高効率化につながる。
船体の姿勢制御は、前翼の迎角を上げることで前翼揚力は船首が上がるように働く.それにより、艇体に固定された主翼でも揚力が増し、艇体を全て離水させる。そして、難水後は翼走している状態を安定させるため、艇体がピッチングしないように船体迎角を一定にとどめる制御をしている。この前翼制御は、水面滑走板機構で制御するものと、超音波センサを用いたAMCSで制御するものとの2種類でやっており、この構成を以下に示す。
2.2 水面滑走板機構の構成
バッテリや太陽電池の出力制限がある競技用水中翼船では、水面滑走板機構での前翼制御を行っている。これは、走行を開始すると滑走板が水の抵抗から、水面付近まで浮上する。それにより、滑走板にリンクされた前翼の迎角も上昇することで船首の浮上に有効な揚力が発生する。そして、船首が浮上することで船全体のピッチ角が大きくなることで主翼からの揚力が働き、離水を行う。翼走時は、浮上高さの変化に対して、低い場合は滑走板の位置が高くなるため前翼迎角が上昇し、高い場合は滑走板の位置が低くなることで前翼迎角が下降する。この動作により、船首の浮上高さを一定値付近で安定させている。この水面滑走板機構の現在の問題点は、走行中において滑走板は常に抵抗として存在することと、ある程度速度が出なければ滑走板が動作しないため、船首の浮上に若干遅れが生ずることである。
2.3 AMCSの構成
AMCSは船首に取り付けた超音波センサより水面までの高さを計測する。そして、超音波センサからの計測値は、電圧信号で出力されV25CPUボードのA/Dコンバータで変換処理し、その値より前翼の最適迎角を計算して制御パルスを出力する。そして、ステッピングモータの制御パルスはTD62803Pを通して送信し、モータが動作する。この動作が前翼の迎角を変化させ、船首高さを変動させる。この動作を繰り返し続けることで、離水及び翼走に必要な船体迎角を制御している。現在までのAMCSの問題点は、超音波センサでの計測から前翼迎角の変化までに若干の時間差があることと、浮上高さが波により誤差が出ること、AMCSの作動のために電源が必要とされることが挙げられる。このAMCSの概要をFig.2.1、超音波センサをFig.2.2で示す。
Fig.2.1 AMCSの概要
Fig.2.2 超音波センサの外観
2.4 制御プログラム
比例制御について
超音波センサによって得られた信号をマイコンによって迎角変換する際に、一体どれだけの角度に決定するか、という問題となる。操縦者が経験と感覚を頼りに調整しても良いが、それではレースにはとても集中できない。そこで自働で処理してくれる制御が必要となってくる。
Golden Eagleで用いているプログラムでは、比例制御を行っている。比例制御とは、比例項のみで制御しており、操作量を目標値と現在値との差(偏差)に比例した大きさとなるようにして、徐々に調節する制御方法である。こうすると、目標値に近づくほど少量になるため、微妙な制御を加えることが出来るので細かく目標値に近づけることが可能となる。
Fig.2.3 比例制御について
|