|
(2)名古屋港実験KGPS航跡図
名古屋港実験で実施したKGPS測量のオフラインによるデータ解析を実施した。
KGPSの測量には、測量現場付近の既知点に基準局が必要であり、基準局から測量現場までの距離は、10-20km以内とされている。今回は、測量現場付近に使用可能な既知点が存在しないため、陸上基準局を設置し、その位置をスタティック測量により求めた後、オフラインによるKGPSデータ処理を行う手法を用いた。設置した陸上基準局及びその測量の概要を表9に示す。
表9. 陸上基準局及びその測量概要
| 場所 |
名古屋市名古屋港ガーデン埠頭岸壁2番 |
| (北緯35度05分19.57643秒、東経136度53分05.32034秒) |
| 日時 |
11月14日 10時02分17秒 ~ 15時21分1秒 |
| 11月15日 10時45分49秒 ~ 14時23分58秒 |
| 測量時間 |
3時間38分10秒~5時間18分44秒 |
| 測量間隔 |
0.5秒 |
| 測量現場からの距離 |
約12km |
| 受信機 |
Trimble社製4000SSE(2周波) |
| アンテナ |
グランドプレーン付きコンパクトL1/l2アンテナ |
|
解析は、GPSurvey2.35ソフトウェアを使用し、基準とした電子基準点ごとに基準局の緯度・経度・楕円体高を算出した。KGPS後処理結果を表10に示す。フィックス解及びフロート解とは、GPS測量の精度を表す解のタイプで、フィックス解は正常な状態を示す。フィックス解の精度は、水平位置で2~3cm、高さで10cm未満のとされている。フロート解は、衛星の捕捉数が不十分な場合や、衛星配置状態が不良な場合などにおける解のタイプで、精度は約数10メートルとされている。
表10. KGPS後処理結果
| 測量開始終了時刻 |
解のタイプ |
捕捉衛星状態 |
| 2002/11/14 2:00-2:47 |
L1 フィックス |
5個 |
| 2002/11/14 2:47-4:59 |
電離層補正 フロート |
4-5個
L2情報が抜けているものもある。 |
| 2002/11/14 5:00-6:21 |
電離層補正 フィックス |
6-7個 |
| 2002/11/15 1:45-5:23 |
電離層補正 フィックス |
6-7個 |
|
15日のKGPS後処理結果のうち、高さ情報を時系列で表したグラフを図16に示す。図中の楕円体高の振幅が大きい時間帯は、補足した衛星の数が4-6個で、フロート解となった時間帯である。また欠損部分は、補足した衛星の数が4個以下で、GPS単独測位となった時間帯であることを示す。
図16. 11月15日KGPS後処理結果(楕円体高)
図17にフィックスした時間帯のKGPS航跡図を示す。
名古屋港実験のKGPS測量では、SeaBat8101の収録時間帯に、フロート解の時間帯が数多く存在したために、本研究のデータ解析では使用することができなかった。
図17. 測量海域における航跡図
(3)扇島南東沖実験DGPS航跡図
扇島南東沖実験のDGPSによる航跡図を図18に示す。北東―南西方向の10測線及び北西―南東方向の10測線、合計20測線である。また測線間隔は約40mである。
| (拡大画面:56KB) |
 |
図18. 扇島南東沖実験DGPS航跡図
(b)動揺データの検証
地形歪み除去を行うためには、地形データが不可欠である。地形データの精度に影響を与える送受波器の動揺データから、水深データの水深値及び水平距離が目標値を達成しているかを検証した。使用した動揺データは、名古屋港実験で収録したPOS/MV及びDMSのものである。ヘディング値については、POS/MVの他に、いせしおに搭載されているGPSジャイロとコンパスの方位センサーを使用した。
海面上を航行する船舶は、不規則な船体動揺を有する。ピッチとロールは、同じ回転運動であるが、船体動揺振幅で表すと図19に示すように、ロールの方が最大約10倍大きい。
図19. 名古屋港実験のPOS/MV収録のピッチ及びロールデータ
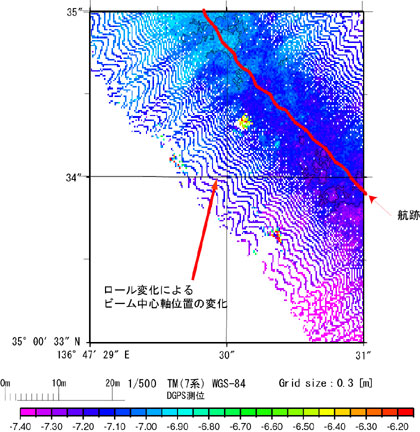
ロール変化は、送受波器からの斜距離、すなわち水深値と送受波器直下からの水平距離に大きな影響を与える。その影響は水深が深いほど、また外側ビームになるにつれて大きくなる。ロール変化の影響は、各ビーム受信時のロール値を用いて、ビームの中心軸位置を求めることにより、補正が可能である。
図20は、図19と同じ時間帯の水深図である。図19に示す送受波器のロール変化に対応して、ビームの中心軸位置が変化するために、ビーム中心軸位置が波模様となって表現されていることを示す。
図20. 名古屋港実験におけるロール変化によるビーム中心軸位置の変化
図7の機器配置図より、POS/MVとDMSの設置位置の差は、水平方向で約30cm、垂直方向で約10cmである。DMSは、あらかじめ送受波器位置までのオフセット値が入力されており、送受波器位置での計測値が出力されている。一方、POS/MVは設置位置での計測値を収録したが、後処理により、便宜上、POS/MVの設置位置を船の重心と仮定して、送受波器位置のヒーブ値を算出した。POS/MVとDMSのロール、ピッチ、ヒーブデータの比較を図21、図22、図23にそれぞれ示す。
図21. POS/MVとDMS収録のロールデータの比較
図22. POS/MVとDMS収録のピッチデータの比較
POS/MVとDMSによって計測されたロール及びピッチデータは、同じ傾向にあるが、DMSの各値は、ロールデータで0.2秒、ピッチデータで0.1秒POS/MVに比べて遅れている。POS/MVのデータは、DMSに比べてバラツキが小さく、安定したデータが得られる。
図23. DMSとPOS/MV収録のヒーブデータの比較
|