|
(b)扇島南東沖実験
(1)概要
扇島南東沖、水深20mの海底には、水深差5m弱の航路壁があり、地形歪み画像の取得及び除去後の画像評価に効果的な場所である。本海域において、計20測線のデータ収録を実施した。実験概要を表6に示す。また、実験に用いた収録システムの構成を図13に示す。
表6. 扇島南東沖実験概要
| 測量 |
第三管区海上保安本部海洋情報部 |
| 実施日 |
平成14年6月28日 |
| 測量船 |
はましお |
| 収集データ |
K-GPSデータ |
| 海底面画像データ |
| 潮位データ(横浜新港験潮所のデータ) |
| 海域 |
扇島南東沖 |
| 機材 |
マルチビーム測深機:船底装備RESON社製 SeaBat8101 |
| データ収録:Coastal社製HYPACK MAXソフトウェア及びデータ収録用パソコン |
| 動揺センサー:TSS社製 DMS2-05(データ間隔:30Hz) |
| 測位機:KGPS |
| 方位センサー:GPSジャイロ |
|
図13. 扇島南東沖収録システムの構成
(2)実験海域
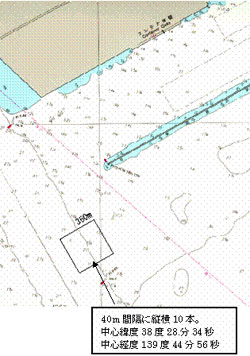
実験海域を図14に示す。扇島南東沖海域の北緯38度28.分34秒、東経139度44分56秒を中心に東西南北0.15マイルで囲まれた範囲である。水深は約20mであった。
図14. 扇島南東沖海域図
(2)収録データのフォーマット検証及びデータ抽出プログラム作成
SeaBat8101で得られた収録データのフォーマットを検証し、海底面画像データ抽出プログラムを作成する。抽出した海底面画像データは、本研究で取り扱う他のサイドスキャンソナーで収録する海底面画像データファイルと共通で扱うことができるファイルフォーマットとする。
(a)収録データフォーマットの検証
SeaBat8101の収録データは、測位データ及び動揺データと共に、HYPACK収録装置に収録される。これらのデータは、HSXフォーマットと呼ばれる特殊フォーマットでファイル化されており、測位データ、動揺データ、方位データ、水深データ、海底面画像データが順次にテキストデータとして収録される。各データには、調査日の午前0時0分0秒からの時間が添付されている。表7はこれらのデータのうち本研究で使用するデータを示したものである。
本研究で取り扱うANKOUのような曳航式サイドスキャンソナーで収録された海底面画像データとの統一化を図るために、各収録データフォーマットから、測位データ、動揺データ、海底面画像データを抽出し、共通のフォーマットとしてファイル出力するためのプログラムの作成を行った。SeaBat8101のHSXフォーマットには、測位データ、動揺データ、方位データ、水深データ、海底面画像データが含まれているため、それぞれに測位データ、動揺データ、方位データを含む水深データファイルと海底面画像データファイルに分けて、処理を実施することとする。
表7. HSXファイルから抽出したデータ
| データの種類 |
データの内容 |
| 位置データ |
時間及び測位データ(原点指定によるTM図法) |
| 動揺データ |
時間及びHeave、Roll、Pitchデータ |
| ヘディングデータ |
時間及びHeadingデータ |
| 海底面画像データ |
時間及び音速(オペレータによる設定値)、高度値、音速(手入力による)、サンプル数。右舷・左舷の海底面画像データ |
| 水深データ |
時間、サンプル数、音速(オペレータによる設定値)、各ビームの斜距離 |
|
(b)海底面画像データファイル出力
HSXフォーマットから海底面画像データを抽出し、海底面画像データファイルとしてファイル出力する。ファイルフォーマットを表8に示す。この海底面画像データファイルは、バイナリファイルで、「ヘッダ部」及び「データ部」から構成される。曳航式のサイドスキャンソナーシステムにも対応させるため、曳航母船位置と、音響あるいはケーブル長によって決定された曳航体の位置の両方を収録することとした。ANKOUを初めとする海底面画像データを収録する全てのシステムは、今後、このフォーマットで統一することとする。測位データは、母船及び曳航体の両方を収録するが、今回のSeaBat8101のような船底装備のシステムは、母船位置のみのデータが収録されている。
表8. 海底面画像データファイル・フォーマット
[ヘッダ部]
| |
フィールド名 |
型 |
バイト数 |
備考 |
| 1 |
ID |
char |
4 |
SSS固定 |
| 2 |
データID |
char |
11 |
SB8101 |
| 3 |
測地原子 |
char |
1 |
0:Bessel、1:WGS72、2:WGS84 |
| 4 |
組織名 |
char |
256 |
海洋情報部固定 |
| 5 |
観測機器 |
char |
256 |
ヌル終端を含む文字列 |
| 6 |
船名 |
char |
256 |
ヌル終端を含む文字列 |
| 7 |
クルーズ名 |
char |
256 |
ヌル終端を含む文字列 |
| 8 |
調査海域 |
char |
256 |
ヌル終端を含む文字列 |
| 9 |
処理開始時刻 |
|
7 |
|
| 1 |
年 |
u_short |
2 |
|
| 2 |
月 |
u_char |
1 |
|
| 3 |
日 |
u_char |
1 |
|
| 4 |
時 |
u_char |
1 |
|
| 5 |
分 |
u_char |
1 |
|
| 6 |
秒 |
u_char |
1 |
|
| 10 |
処理終了時刻 |
|
7 |
|
| 1 |
年 |
u_short |
2 |
|
| 2 |
月 |
u_char |
1 |
|
| 3 |
日 |
u_char |
1 |
|
| 4 |
時 |
u_char |
1 |
|
| 5 |
分 |
u_char |
1 |
|
| 6 |
秒 |
u_char |
1 |
|
| 11 |
ファイル情報 |
|
可変長 |
|
| 1 |
ファイル数 |
int |
4 |
読み込んだファイル数 |
| 2 |
ファイル名 |
char |
256×ファイル数 |
入力ファイル名("*.hsx")を読み込んだファイル数分繰り返す |
|
[データ部]
| |
フィールド名 |
型 |
バイト数 |
備考 |
| 1 |
Julian |
time |
double |
4 |
| 2 |
母船緯度 |
double |
8 |
度単位南緯は負数 |
| 3 |
母船経度 |
double |
8 |
度単位西経は負数 |
| 4 |
曳航体緯度 |
double |
8 |
度単位南緯は負数 |
| 5 |
曳航体経度 |
double |
8 |
度単位西経は負数 |
| 6 |
ヘディング |
float |
4 |
北が0度時計回り 度単位 |
| 7 |
ロール |
float |
4 |
+:port up度単位 |
| 8 |
ピッチ |
float |
4 |
+:bow up度単位 |
| 9 |
高度 |
float |
4 |
m単位 |
| 10 |
深度 |
float |
4 |
m単位 |
| 11 |
音速 |
float |
4 |
m/sec単位 |
| 12 |
画像データ数 |
u_short |
2 |
1024個 |
| 13 |
スワス幅 |
float |
4 |
m単位 |
| 14 |
片側のレンジ |
float |
4 |
m単位 |
| 15 |
ピクセルサイズ |
float |
4 |
m単位 |
| 16 |
STBD |
u_char |
1×可変長 |
外側から直下の順SeaBat8101:1024個 |
| 17 |
PORT |
u_char |
1×可変長 |
直下から外側の順SeaBat8101:1024個 |
|
(3)データ収録時における送受波器の動揺データの検証
HSXファイルに含まれるDGPS測位データ(x、y)を抽出するプログラムを作成し、緯度経度値に変換後、航跡図を作成する。また送受波器動揺データ値について、水深値及び水平距離が目標値を達成しているかを検証する。
(a)航跡図の作成
(1)名古屋港実験DGPS航跡図
名古屋港実験で収録したDGPSによる航跡図を図15に示す。計13測線のデータを収集した。
図15. 名古屋港実験DGPS航跡図
|