|
(2)無人探査機「かいこう」「ドルフィン−3K」「ハイパードルフィン」
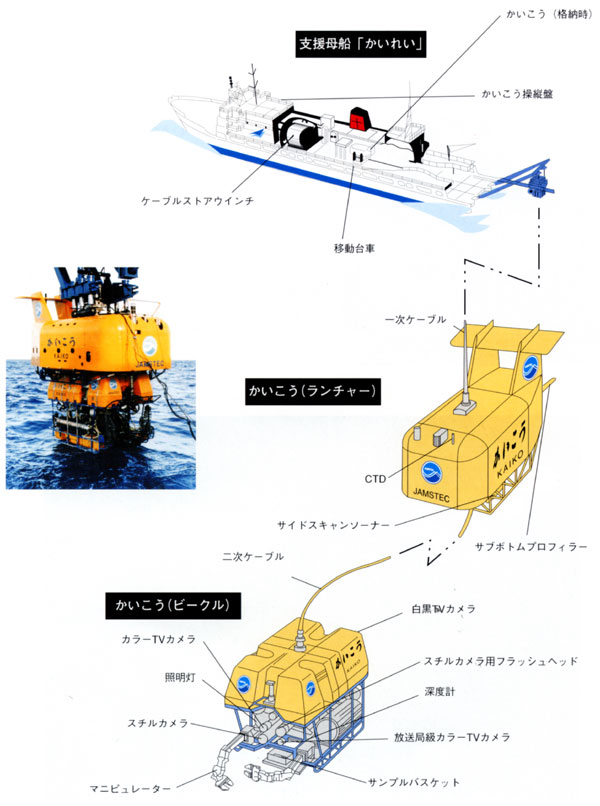
これらは、それぞれの母船(「かいこう」の母船は「かいれい」、「ドルフィン3K」の母船は「なつしま」、「ハイパードルフィン」の母船は「かいよう」)とケーブルで結ばれており、船上からのリモコン操作により、観察のみならずマニピュレーターを用いてサンプル採取などをすることができます。中でも「かいこう」は、ランチャー/ビークル方式という他の無人機とは異なった方式がとられています。すなわち、「ドルフィン−3K」等、一般的な無人機は、母船から繰り出されるケーブルに本体が直結された形で潜りますが、「かいこう」では、「一次ケーブル」と呼ばれる同様なケーブルが母船とランチャー(launcher:水中発射台)の間に取り付けられ、さらにランチャーと本体(ビークル)とは二次ケーブルによって接続されています。そして本体は、ランチャーに抱えられるような恰好で目的の深度近くまで潜り、そこでランチャーから発進されて、二次ケーブルの範囲内(約50m)で行動します。このシステムにより、1995年3月に、世界の海の最深度(マリアナ海溝の10,911m)に到達することができました。なお、このランチャーには後述する「サイドスキャーンソーナー」が装備されており、曳航型探査機として単独で使用することもできます。それぞれの無人探査機の概要は、以下に示すとおりです。
| 左:ビークル、カッコ内:ランチャー |
| かいこうの仕様 |
| 全長 |
3.1
(5.2) |
m |
水中速力 |
前進 |
3.0 |
ノット |
| 巾 |
2.0
(2.6) |
m |
上昇下降 |
1.0 |
ノット |
| 高さ |
3.2
(3.2) |
m |
光ケーブル |
一次ケーブル |
45.0mm×12,000m |
| 空中重量 |
5.4
(5.4) |
t |
二次ケーブル |
29.5mm×250m |
| 最大潜航深度 |
11,000
(11,000) |
m |
|
|
|
|
|
「かいこう」は、母船とケーブルでつなぎ、船からリモートコントロールで動かします。「かいこう」では、ビークル(探査機本体)が動きやすいようにランチャー(水中発着台)という方式を使っています。
かいこう操縦盤
盤に表示されるビークルの放送局級TVカメラの映像やパノラマ映像等の情報を基本に操縦者(4人)が操縦します。
| (拡大画面:79KB) |
 |
| カッコ内はハイパードルフィン |
| ドルフィン−3K及びハイパードルフィンの仕様 |
| 全長 |
3.1
(5.2) |
m |
水中速力 |
前進 |
3.0
(3.0) |
ノット |
| 巾 |
2.0
(2.6) |
m |
上昇下降 |
1.0
(2.0) |
ノット |
| 高さ |
3.2
(3.2) |
m |
光ケーブル |
45.0mm×12,000m |
| 空中重量 |
5.4
(5.4) |
t |
29.5mm×250m |
| 最大潜航深度 |
11,000
(11,000) |
m |
|
|
|
|
ドルフィン−3Kは、単独の調査のみならず「しんかい2000」の潜航海域の事前調査等に運用されていますが、最近では、沈船(ロシアのタンカー「ナホトカ号」や学童疎開船「對馬丸」など)や打ち上げに失敗して海中に没したH2ロケットの捜索にも活躍しました。また、ハイパードルフィンは、ドルフィン−3Kの高性能版といったもので、今後の活躍が期待されています。
(3)UROV、AUV
無人潜水機は、大別すると2つに分けられます。1つは、有索の無人潜水機で、「かいこう」のように無人潜水機と支援母船とをケーブルで結び、母船上で操縦者が水中TVカメラの映像を見ながら、それを遠隔操作するものです。2つ目は、無索の無人潜水機で、機体内に動力源を内蔵し、ケーブルを用いずに運用します。
UROV(Untethered Remotely Operated Vehicle:細径ケーブル無人潜水機)システムでは、動力源となる電池(二次電池*2)は、ビークルに搭載されており船上装置とビークルは、直径約1mmの光ファイバーケーブル1本で結ばれています。
そして、船上とUROVの両方に、光ファイバースプーラという光ファイバーケーブルを釣り糸のリールのように巻いた筒があり、ここから光ファイバーケーブルを繰り出しながらビーグルが航行します。光ファイバーケーブルは、潮流などにより微妙な力を受けた場合にも、光ファイバースプーラからスムースに繰り出されるようになっています。UROVは今までのROVのように太いケーブルを引っ張りながら航行する訳ではないので、運動性能は、従来のものに比べ、格段と向上しています。UROVに関しては、当初試作機の「UROV2000」と、当センターと福井県との共同利用による実用機器「げんたつ500」の開発に着手してきましたが、平成9年度には、最大潜航深度7000mのUROV(UROV7000K)の開発を行いました。これは、所有する光ファイバーケーブルの長さが30000mもあるので、行動半径も広くなりました。
通常のオペレーションは、海底までは錘(しんかい2000で使われるのと同様の鉄:ショットバラスト)の重さで下降し、海底に到着した時点でその錘を切り離して中性浮力とし、ここからスラスタを作動させて調査活動を行います。調査活動が終了したら、上昇用の錘を切り離し、さらに光ファイバーケーブルを自ら切断して上昇します。もし、調査中に係留索や障害物にケーブルが絡まって光ファイバーケーブルが切断した場合でさえ、終了時のオペレーションと同様の手順で本体を浮上させることができます。
| *2 |
バッテリーには、大きく分けて一次電池と二次電池があります。前者は、充電して再利用することはできませんが、後者は、充電して再利用することができます。 |
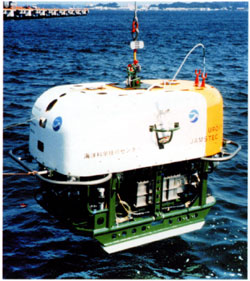
試験中のUROV7K
一方、「うらしま」のような無人潜水機は、自律型海中ロボット(AUV:Autonomous Underwater Vehicle)とも呼ばれ、これまでの無人機のように母船とケーブルでつながれることなく、文字通り自律航行ができるロボットです。AUVという言葉は、一般的に「無索」無人潜水機を総称して使われていますが、音響信号を用いて、母船と無人潜水機の間で位置信号や制御信号を送受する「音響遠隔操縦方式」の無人潜水機もAUVの中に入ります。これまで、世界中で製造されたほとんどのAUVがこの方式です。母船から制御信号を受け取らずに自律航行できる「真のAUV」は、加国海軍の「Theseus」、英国NERC(自然環境研究評議会)の「MARIN」、米海軍の「XP21」等、数例しかなく、いずれも国家的な事業として開発が進められています。
欧米諸国のAUVの開発は、既に第1段階を終え、次の段階に進展しようとしており、わが国は、一歩遅れをとっています。しかし、長距離を航行するための技術開発において、最重要課題とされるのは、高エネルギー効率の動力源に関する問題ですが、これに関しては、欧米諸国が未だ有効な新動力源を開発することができず、従来の鉛電池又は銀亜鉛電池を用いています。これに対し、海洋科学技術センターでは、エネルギー効率の良い燃料電池*3とリチウム・イオン電池の開発を行い、これらは、既に実用化のメドが立っています。この点に関しては、逆に2歩ないし3歩リードしているといえるでしょう。平成13年8月水深3,518mの世界最深記録を更新しました。
| *3 |
これは、燃料に水素を用い、酸化剤に酸素を用いて電解質を介して反応させる方法で直流の電気を直接取り出すことのできる「発電機」です。原理は、「水の電気分解の逆」で、戦前から考えられていたことですが、単に水素と酸素を混ぜ合わせただけで電気が発生する訳ではなく、“逆”は、それほど簡単なものではありませんでした。
しかし、数年前に高性能の電解質膜(スルホン酸膜)が開発されたのを受けて、固体高分子電解質型燃料電池(燃料電池のこと)の性能が格段と向上し、実用のメドが立ってきました。当センターでは、平成5年に水中機用燃料電池(1.5キロワット)を試作し各種の性能試験を実施して技術を蓄積してきました。この電池の開発例は、日本初の試みであり、世界でも数少ないものでした。 |
名称:深海巡航探査機 愛称:うらしま
|