|
深海の調査
深海は、私たちの想像を越えた極限の世界です。この世界に足を踏み入れるためにはまず、特殊な機器を開発しなければなりません。これまで、海洋科学技術センターをはじめ世界の海洋研究機関が深海底に到達するために、さまざまな技術開発を行ってきました。このような機器の開発の前に立ちはだかるのは、何といっても水圧です。深海調査機器の開発では、まずこの問題を解決しなければなりません。また、船上からのリモコン操作で作動する従来の無人潜水機(ROV:Remotely Operated Vehicle)では、支援母船から電力の供給に使われる太いケーブルが存在するため、ブイなどの係留系を監視する場合には、それにケーブルが絡まる可能性があります。そこで、当センターでは、これらの問題を回避し、しかも、深海底の調査に適した細径ケーブル無人潜水機(UROV:Untethered Remotely Operated Vehicle)システムの開発に取り組み、平成9年度には、最大潜航深度7000mのUROV(UROV7000)を開発しました。さらに、平成10年度からは、自律型無人潜水機(AUV:Autonomous Underwater Vehicle)の試験機の建造を開始しました。数年後には、300kmを自律航行できることを目標に開発を進めています。ここでは、あまり知られていない有人潜水船の作り方と現在開発中の最新機器について紹介します。
深海調査機器の開発
(1)有人潜水船「しんかい6500」「しんかい2000」
これらの潜水船に付けられた数字は、それで潜ることのできる最大深度を表しています。これらは、共に専用の母船(「しんかい6500」の場合は「よこすか」、「しんかい2000」の場合は「なつしま」)により運用されています。下記の仕様で明らかなとおり、潜水船自体は、極めて重いものですが、周囲に多数の浮力材が取り付けられているために、いかなる場合でも水面で浮くような構造になっています。したがって、潜航の際には鉄のオモリを積み込んでその重みで沈み、海底に到着したらそれを引き放して中性浮力の状態で航行し、浮上時には、バラスト*1を排除して、浮力材の力で浮かび上がります。要するに、潜水船本体の動力や照明がバッテリーによりまかなわれているので、それを節約する知恵が生かされているのです。また、これらの潜水船は、外見上は比較的大きく見えますが、実際に人間が乗り込むスペースは、直径約2m程度の球(耐圧殻)の中でしかありません。この中にパイロットを含め3名が乗り込み、8時間前後滞在するのは、予想以上に大変なことなのです。しかも耐圧殻の中は、周囲の水温の影響をまともに受けるので、深度が1000mを越えたあたりからは、防寒対策をとらなくてはなりません。中にはトイレは、ありません。以下に、これらの潜水船の概要を紹介します。
| *1 |
これは、船の浮力や傾斜を調整するために使われるもので、一般的には水(ウオーターバラスト)が多く使われますが、砂や鉄材(固定バラスト)が使われることもあります。 |
カッコ内 しんかい2000
| しんかい6500・しんかい2000の仕様 |
| 全長 |
9.5
(9.3) |
m |
乗員数 |
3
(3) |
名 |
| 巾 |
2.7
(3.0) |
m |
耐圧殻内径 |
2.0
(2.2) |
m |
| 高さ |
3.2
(2.9) |
m |
通常潜航時間 |
8
(6) |
時間 |
| 空中重量 |
25.8
(23.2) |
t |
水中速力 |
最大2.5
(3.0) |
ノット |
| 最大潜航深度 |
6500
(2000) |
m |
|
|
|
|
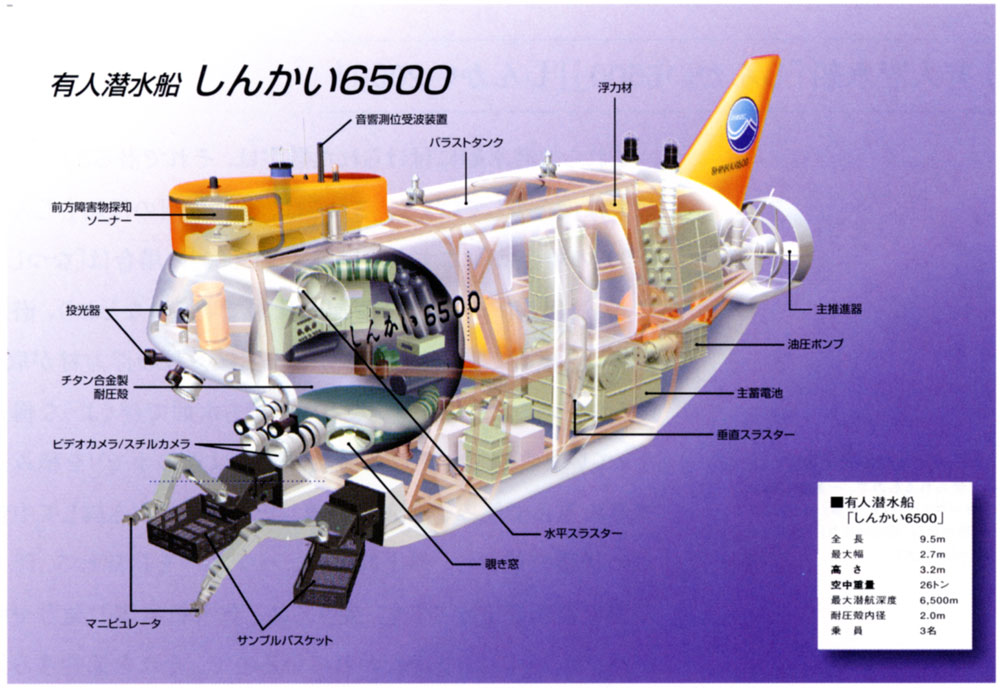
◆「しんかい6500」の概要図
| (拡大画面:135KB) |
 |
「しんかい6500」機器説明
| 前方障害物探知ソーナー |
投光器の光の届かない、15m以上の遠方の障害物を音響的に探知します。これによって、対象物までの距離が判断できます。 |
| 投光器 |
海底は光が届かないため真っ暗な世界です。海底を観察するときに点灯させます。海域により異なりますが10〜15m先まで見ることができます。 |
| チタン合金製耐圧殻 |
高い深度圧に耐える耐圧殻・耐圧容器構造の材料として、比強度が高く耐食性に優れたチタン合金が採用され、同時に三次元機械加工・電子ビーム溶接法を運用し、高精度真球に近い構造を実現しています。 |
| ビデオカメラ/スチルカメラ |
海底の様子を録画したり、写真撮影したりします。 |
| マニュピュレータ |
海底で採泥や岩石の採取及び観測機器の設置などを行います。 |
| サンプルバスケット |
マニュピュレータで採取した試料や観測機器を収納します。 |
| 覗窓 |
乗船者が実際に海底を観察する窓で厚さ約14cmのメタクリル樹脂(アクリル樹脂の一種)で作られています。 |
| 水平スラスター |
船首を右方向及び左方向に回頭させることができます。 |
| 垂直スラスター |
海底で上昇及び下降を行います。 |
| 主蓄電池 |
潜水船動力源となります。 |
| 油圧ポンプ |
潜水船で使用する油圧機器を動かすため使います。 |
| 主推進器 |
前進及び後進を行います。また、左右80°動くため舵の役目もします。 |
| 浮力材 |
ガラスの微少中空球を樹脂で固めた、シンタクチックフォームを採用しています。 |
| バラストタンク |
水面では浮き袋の役目をしています。潜航するときは空気を抜くと海水が入ります。 |
| 音響測位装置 |
潜水調査船自身が自分の位置を確認する装置です。 |
|
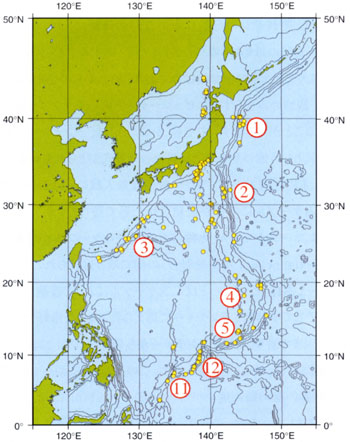
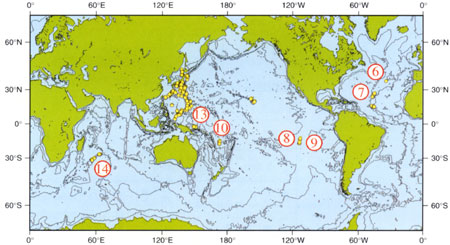
◆「しんかい6500」潜航地点と海域
(1)日本海溝
(2)伊豆・小笠原海溝
(3)南西諸島海溝
(4)マリアナトラフ
(5)南部マリアナトラフ
(6)大西洋中央海嶺
(7)大西洋中央海嶺
(8)東太平洋海膨
(9)東太平洋海膨
(10)北フィジー海盆
(11)パラオ海溝
(12)ヤップ海溝
(13)マヌス海盆
(14)インド洋
|