Table 5 Function of DP-MAP
Vessel type
●Semi-submersible vessel
●Mono-hull vessel
●FPSO
●Others |
External force condition
●Fluctuating external force
Wave (Wave drift force)
Wind
●Steady external force
Current |
Thruster
●Azimuth
●Others |
Mooring
●Chain
●Wire
●Combination of chain and wire |
Table 6 Input/output data of DP-MAP
<Input data>
Platform main data
●Displacement and inertia moment
●Representative length
●Representative wind pressure area |
Environmental condition data
●Unsteady wave (Wave direction change, average wave period, Significant wave height, and wave spectrum)
●Wind (Wind direction change, wind velocity, and wind spectrum)
●Current (Current direction change and current velocity) |
Environmental external force coefficient data
●Wave drift force coefficient
●Wind load coefficient
●Current force coefficient |
Mooring main data
●Mooring point coordinates |
Thruster data
●Thruster position coordinates
●Maximum thruster capacity |
Control
●PID gain
●Calculation time interval
●Control time interval
●H∞controller
●Fuzzy controller
Simulation data |
<Output data>
Time history
●External force
●Movement (Roll, pitch, and yaw)
●Thruster azimuth angle
●Thrust
●Mooring force
Movement wake |
Figure 6 shows an example of the display screen output of the DP-MAP.
This behavioral analysis simulation tool includes the fluid force characteristic, and it is able to apply it to the actual system design.
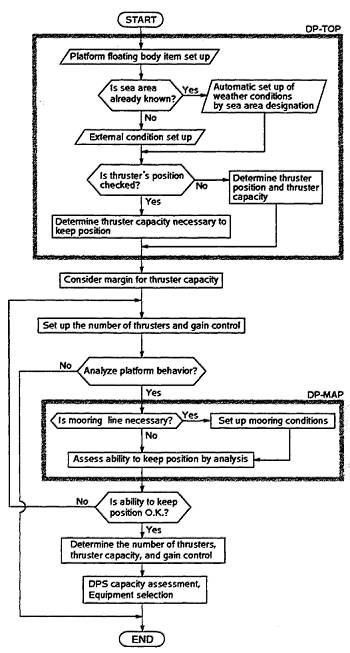
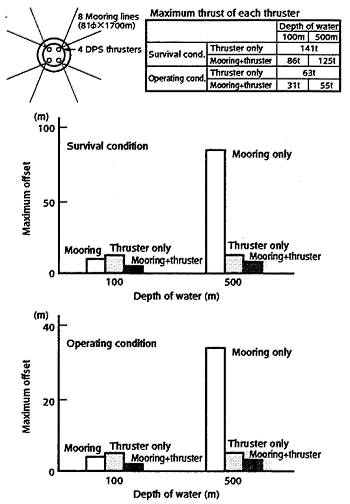
As a result of the DP-MAP development, we have created a behavioral analysis method for a platform which keeps its position with a DPS system. It can consider mooring influence, and it also able to carry out platform behavioral analysis regardless of mooring and DPS examination. Figure 7 shows DPS examination flow chart using DP-TOP and DP-MAP. The calculated result of the position keeping ability of a DPS system and mooring is as per Figure 8.
Fig.6 Display screen output of DP-MAP
Fig. 7 Flow chart of DPS procedure with DPS analysis program
Fig. 8 Ability to keep position by DPS and mooring