5. DPS TANK EXPERIMENT FOR VERIFICATION
In order to verify the control performance of the H∞ control method, the tank experiment has been performed[7]. The experiment has been performed under the condition that the vessel type FPSO model is positioned and controlled by four units of thruster models and considering wave and wind as disturbances.
The FPSO model which expects a modified 120 KDWT tanker model was used. The scale of the model specimen was 1/50 and the specifications of the specimen are shown in Table 7. Four units of swing thrusters (bow thruster: 2 units, stern thruster: 2 units) have been mounted on the model.
Table 7. Data of offshore platform
| 1/S=1/50,√S=7.071 |
| FPSO : 120KDWT Tanker |
| Item ( symbol ) |
Full load |
| prototype |
Model |
| Length ( L ) |
255.7m |
5,114mm |
| Breadth ( B ) |
42.31m |
846.1mm |
| Depth ( D ) |
22.00m |
440.1mm |
| Draft ( d ) |
14.62m |
292.2mm |
| Trim ( t ) |
0% |
| Displacement weight ( Δ ) |
135,441t |
1,057kg |
The blower providing external air force is so designed that its air velocity is controlled by the inverter. Steady-state and variable air forces were given to the model to verify the degree of affection bythese air forces. Because the affection by the variable air was found to be small, the experiment was performed mainly using the steady-state air.
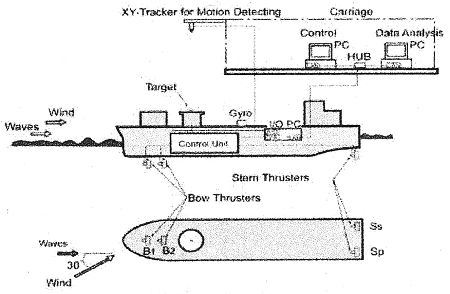
The configuration for the experiment and the photo showing the state of the experiment are shown in Figure 9.
Fig. 9 Overview of tank test
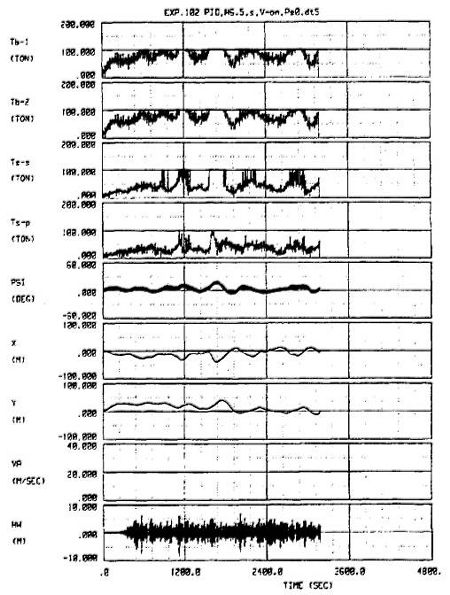
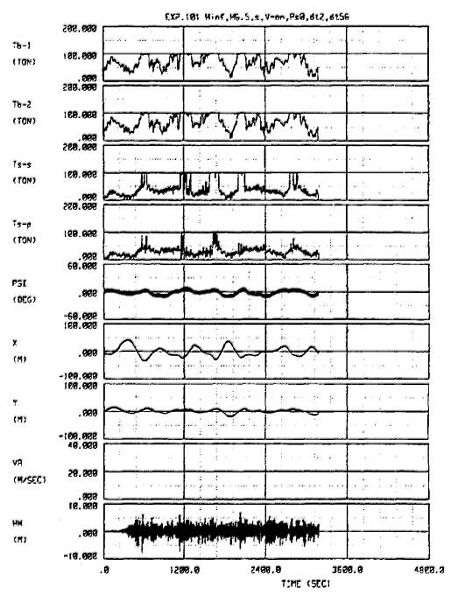
Figure 10 shows the results of the time history for PID control at the maximum thruster capacity of 100 tons. Similarly, the time history for H∞ control is shown in Figure 11. By the H∞control, a control less in thruster control force variation has become possible to be performed.
Figure 12 shows the comparison between the maximum amount of deviation and the thruster mean control force on the track drawing. The figure shows that, by the H∞ control, the positioning performance is increased more than that by the PID control, and a DPS control less in thruster mean control force is realized. By the H∞ control, it was found that the positioning performance was increased by 25% more than that by the PID control, and the thruster mean control force was reduced by approx. 10% more than that by the PID control.
Fig. 10 Tank test result (PID control)
Fig. 11 Tank test result (H∞ control)