4. BEHAVIOR ANALYSIS SIMULATION TOOL
Behavioral analysis simulation tools, DP-TOP and DP-MAP, have been developed in order to assess the control ability of the platform with a DPS.
DP-TOP carries out static balance calculation of static external force functioned for platform by wind, wave and current, and that of the thruster thrust, and gets required minimum thruster capacity.
It is useful to examine the required thruster capacity in the process of initial plan with DPS. In addition, it is also possible to analyze the thrusters optimum position. Table 1 shows the calculation function of DP-TOP.
Table 1 Function of DP-TOP
| Program |
Calculation function |
Average file input/output |
| DP-TOP |
○Calculation of required thruster capacity by static balance calculation
○Optimization calculation of thruster position
○Data input/output by GUI |
None |
The program, drawn up using a personal computer and GUI (Graphical User Interface), was adapted for input/output, so that more users can use it easily. The entire program of DP-TOP consists of input/output components by GUI, and a calculation component, is formulated with C, FORTRAN languages.
The basis of this programs, mathematical logic is to solve the thrusters thrust distibution problems with an established format, as a mathematical problem plan under several restricted conditions, in order to minimize assessment problems such as capability and cost.
In the GUI input/output component, dialogue manager is mainly used and a presentation manager is used for partial graphic image display. The purpose of the dialogue manager is to gather dialogue service based on the presentation managers functions, and present an interface which controls displays, handle variable, and application flow to window panels and messages.
The function of the DP-TOP and input/output data are shown in Table 2 and Table 3 respectively.
Table 2 Function of DP-TOP
Vessel type
●Semi-submersible
●Mono-hull
●FPSO
●Others |
External force condition
●Wave, Wind, and current |
Thruster
●Azimuth
●Others |
Type of analysis
●analysis of required thruster capacity
●analysis of optimum thruster position |
Table 3 Input/output data of DP-TOP
<Input data>
●Displacement
●Representative length
●Representative wind pressure area |
<Output data>
●Necessary thruster capacity
●Thruster azimuth
●Evaluation function
●Oputimum position coordinates |
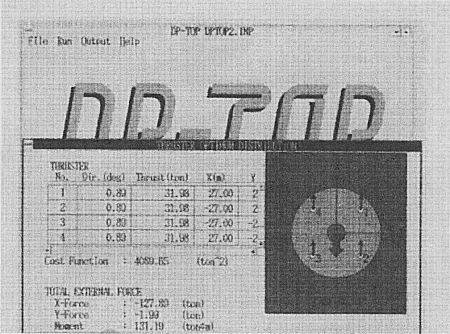
Figure 4 shows an example of a GUI screen. This is an analysis example based on the assumption that four thrusters of maximum capacity 80t, are installed on a mono-column type platform[6].
Fig. 4 GUI screen of DP-TOP
The DP-MAP is a dynamic analysis program utilized to simulate the motion of the platform with the DPS under compound fluctuating disturbances of wind, wave, and current. As Table 4 shows MOORFORC, which calls up mooring characteristic data, is included as a DP-MAP related program.
Table 4 Function of DP-MAP and relevant program
| Program |
Calculation function |
Average file input/output |
| DP-MAP |
○Calculation based on historical data of platform with DPS
○Output plot of caluculation results |
<File output>
○Plot data file
<File input>
○Mooring
characteristic table |
| MOORFORC |
○Static mooring caluculation
○Mooring characteristic table file call up |
<File output>
○Mooring
characteristic table |
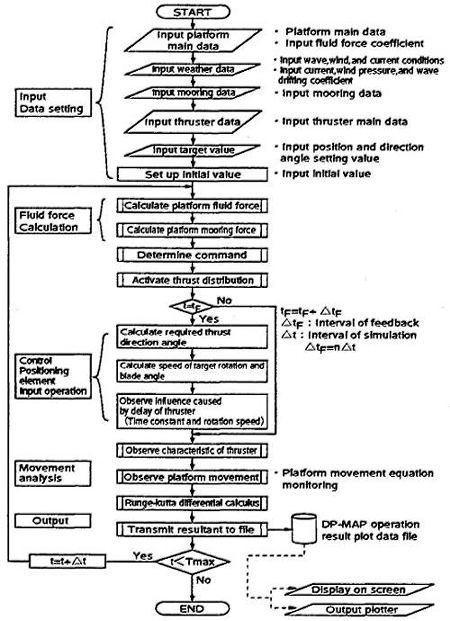
DP-MAP program consists of input data, data set component, fluid force calculation component, control component, movement analysis component, and output component. The program flow and the function of DP-MAP is shown in Figure 5.
At the control section, based on input from the input component and data set component, you can carry out a command decision operation, thrust distribution operation and positioning element input operation, after adding the fluid and mooring force functions of the platform. At the movement analysis section, you can carry out a thruster characteristic operation and platform movement operation. Each time the program's loop operation cycles, time increment Δt is added and it moves to the output component, when t gets bigger than the simulation time set value Tmax. At the output section, operation results can be observed in two ways, on a display screen and a plotter output, by transmitting the resultant data in the file.
Table 5 and Table 6 show the function of the DP-MAP and input/output data, respectively.
Fig.5 Flow chart of DP-MAP program