3. CONTROL SYSTEM DESIGN
In the robust control system design, the control system design model to be described must be obtained from the equations of motion for offshore platform (1) to (3) by using state variables, and utilized for design.
(1) Equations of motion
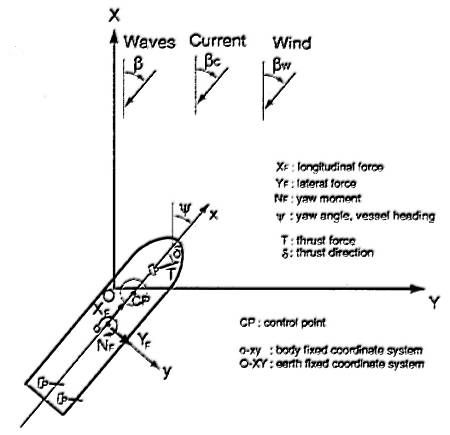
The equations of notion for offshore platform are expressed by the following expressions where the coordinate system is as shown in Figure 3. The equations of motion express the motions in Surge, Sway, and Yaw directions, respectively[5].
(m+mx)u-(m+my)vr+(mx+my)Ucr sin(βc-ψ)=XH+Xr+XA+Xw(1)
(m+my)v+(m+mx)ur+(mx+my)Ucr cos(βc-ψ)=YH+Yr+YA+Yw(2)
(Izz+Jzz)r = NH+Nr+NA+Nw(3)
| m : |
Mass of floating body |
|
| mx : |
Additional mass in x-axis direction |
|
| my : |
Additional mass in y-axis direction |
|
| Izz : |
Moment of inertia about gravity center of floating body |
|
| Jzz : |
Additional moment of inertia abut gravity center of floating body |
|
| u : |
Component of motion velocity of floating body in x-axis direction in object fixed coordinate system |
|
| v : |
Component of motion Velocity of floating body in y-axis direction in object fixed coordinate system |
|
| r : |
Angular velocity in turning motion |
|
| ψ : |
Angle in turning motion |
|
| U : |
Tidal current velocity |
|
| β : |
Tidal current direction |
|
| XH,YH,NH : |
Longitudinal force, lateral force, and moment received by platform |
|
| Xr,Yr,Nr, : |
Longitudinal force, lateral force, and moment produced by thruster |
|
| XA,YA,NA : |
Longitudinal force, lateral force, and moment produced by wind |
|
| Xw,Yw,Nw : |
Longitudinal force, lateral force, and moment produced by wave |
|
Fig. 3 Coordinate system
(2) Control system design model
The equations of motion are linearized to obtain the control system design model.
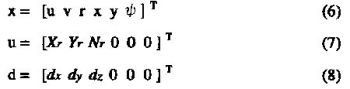
(a)Equation of state
(b) Equation of output
Where x indicates the equation of state, u indicates the control input, and d indicates the disturbance input.
Where A, B, C, and D are the matrixes obtained from the equations (1) to (3), respectively, and T is the transposed matrix.
(3) Setting of disturbance model
The disturbances affecting the Offshore platform include wind, wave, and tidal current, and wind and tidal current can be expressed as an external force of low frequency component. Also, wind can be divided into two parts: a long period variable drifting force of low frequency component and a forced wave force of high frequency component. Therefore, wind, tidal current, and long period variable drifting force are modeled as low frequency component disturbances and forced wave force is modeled as a high frequency component disturbance.
(a) Low frequency disturbance model
The low frequency disturbance model must be a disturbance of less than 0.09 Hz in frequency, and expressed by the following transfer function of the first-order lag element as follows.
Here the control deviation can be suppressed more by increasing a gain A larger and also taking a low frequency disturbance into consideration.
(b) High frequency disturbance model
The high frequency disturbance model must be a disturbance of 0.09 Hz or more in frequency, and expressed by the following transfer function of the second element as follows.
Where ω indicates the center frequency of a high frequency disturbance.
(4) Setting of weighting function
The weighting function consists of a sensitivity weighting function as a weighting function to a deviation and a control sensitivity weighting function as a weighting function to a thruster input. These two weighting functions are set using the following expression.
(a) Sensitivity weighting function
The sensitivity weighting function as a weighting function to a deviation is selected to become a low pass filter so that a deviation is reduced against a disturbance in low frequency area. When the filter is moved near an integrator 1/s, die integration characteristics of the controller can be intensified and a steady-state deviation can be reduced.
(b) Control sensitivity weighting function
The control weighting function as a weighting function to a thruster input is selected to become a high pass filter so that a thruster control force is reduced against a disturbance in low frequency area. When the filter is moved near an integrator s, the integration characteristics of the controller can be intensified. In order to verify the control performance of the H∞ controller, the numerical simulation has been performed before the tank experiment. The results obtained are shown in the section 5.
(5) Thruster force distribution logic
The nonlinear programming method is carried out using the mixed-penalty method and the modified quasi-Newton method. In order for the method to be applied to offshore platform motion nonlinear characteristics including thruster restriction conditions and mechanical cost functions must be defined. First, to satisfy the following constraint functions, the manipulated variable is distributed as the force in the x and y-direction for each thruster in this algorithm Next, the x and y-force components are converted into the resultant force and direction for each thruster. Equations(12)-(14) describe the mechanical conditions which serve as constraint functions of the distribution method.
Thruster force is distributed to satisfy Equations (12)-(15), and to minimize Equation (16) by the previously mentioned nonlinear programming.