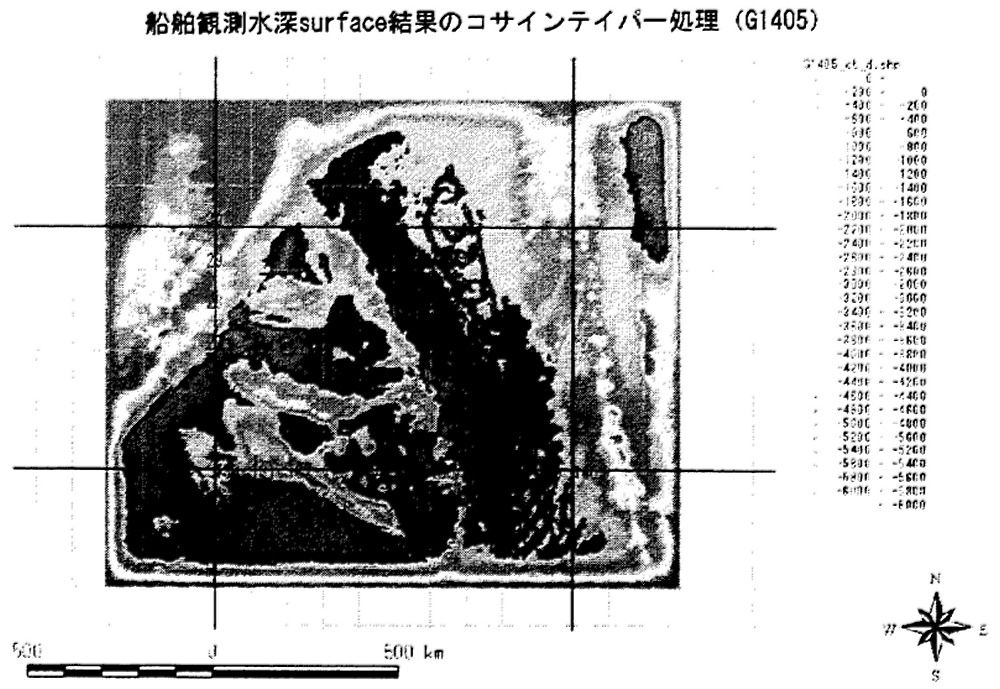
モデル海域(G1405)での結果を図2-18に示す。
(6)上記(5)の結果に対してロウパスフィルターによる長波長成分の抽出を行った。(
図2-4の手順1-3)
GMTのgrdfftコマンドを改良してSmith and Sandwell(1994)の式(10)を参考にロウパスフィルターを作成し、grdfft3としてGMTに組み込んだ。波長160kmで振幅が0.5になるようパラメータを設定して用いた。
% grdfft3 $1-G$2 -W30000 -L -M -V
$1:入力grdファイル(GMT用フォーマットのバイナリ形式)
$2:出力grdファイル(GMT用フォーマットのバイナリ形式)
-W30000:Smith and Sandwell(1994)の式(10)中のパラメータsとして30000[m](=30km)を指定。s=30000m(=30km)はSmith and Sandwell(1994)に準拠。
-L:FFTでトレンドを残すオプションを指定
-M:単位を度からメートルに変換して処理するオプションを指定
W(k)=1-exp[ -2 (π* k* s)** 2] k:波数、s:係数(30000[m])
これを参考にgrdfft3では
W(k)=exp[ -2 (π* k* s)** 2]
の形で長波長成分を取得している。
例:1/k=波長=160kmかつs=30kmの時はW(k)=0.5になる。
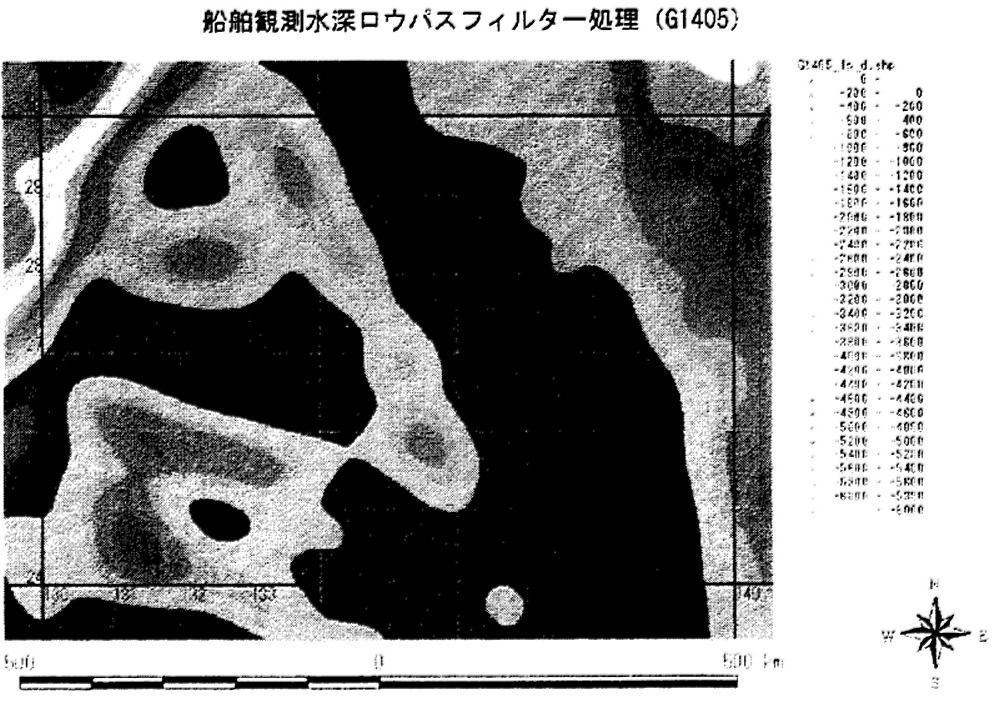
モデル海域(G1405)での結果を図2-19に示す。
(拡大画面: 136 KB)
図2-18 船舶観測水深surface結果のコサインテイパー処理
(拡大画面: 153 KB)
図2-19 船舶観測水深ロウパスフィルター処理
(7)上記(5)の結果に対してバンドパスフィルターによる波長10〜160km成分の抽出を行った。(
図2-4の手順1-4)
GMTのgrdfftコマンドを改良してSmith and Sandwell(1994)の式(10)及び(11)を参考にバンドパスフィルターを作成し、grdfft2としてGMTに組み込んだ。波長10km及び160kmで振幅が0.5になるようパラメータを設定して用いた。
% grdfft2 $1 -G$2 -W30000/9500/0,0 -M -V
$1:入力grdファイル(GMT用フォーマットのバイナリ形式)
$2:出力grdファイル(GMT用フォーマットのバイナリ形式)
-W30000/9500/0.0:Smith and Sandwell(1994)の式(10)中のパラメータsとして30000[m](=30km)、式(11)中のパラメータAとして9500[km]を指定。s及びAの値はSmith and Sandwell(1994)に準拠。
注:Smith and Sandwell(1994)の式(10)については上記ロウパスフィルターの項参照。
Smith and Sandwell(1994)の式(11)は下記の通り。
W(k)={1+Ak4exp[ 4* π* k* d ] }-1
ここで、k:波数、A:係数(9500 [km4])d:基準水深
例:1/k=波長=9.87kmかつA=9500kmかつd=0(海水面)の時はW(k)=0.5になる。
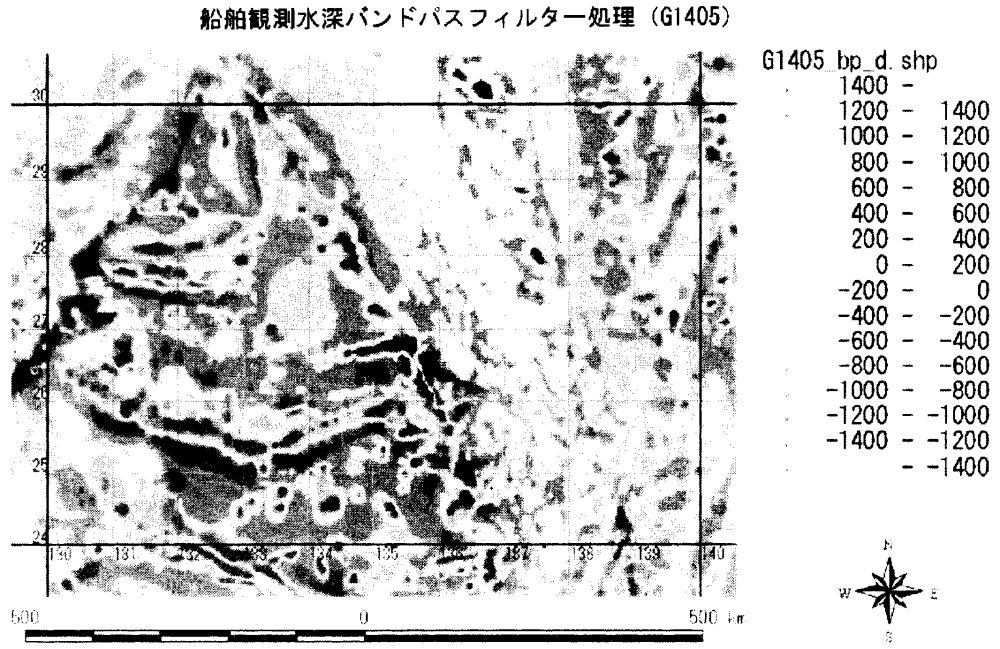
モデル海域(G1405)での結果を図2-20に示す。
(拡大画面: 196 KB)
図2-20 船舶観測水深バンドパスフィルター処理