|
5. 実験装置の概要
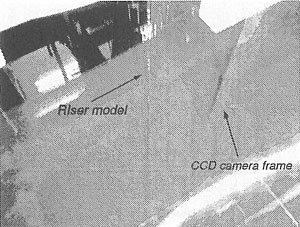
前報4)の結果を踏まえ、九州大学応用力学研究所深海機器力学実験水槽(65×5×7m)において検証実験を行った。使用したライザー管モデルの基本的な物理定数等をTable 1に示す。管の材質はポリエチレンとテフロンの合成樹脂(PTRE)である。なお、下端部に付けた錘は、管の初期形状を整えるために設置したものであり、本論文では錘の影響も運動方程式の張力成分Teに反映させ考慮している。Fig. 3は、管を水面上から見たものである。この管上端部をFig. 4に示すようなパラレルリンクを用いて位置制御を行うことにより、ライザー管のリエントリー作業を模擬することとした。管全体の挙動は計14台のCCDカメラを用いて、Fig. 7に示すように配置されたマーカーの挙動を計測する。CCDカメラは、2つの翼形状のフレームに7台ずつ(CA1〜CA7、CB1〜CB7)内包されており、Fig. 6に示すように配置されている。実験後に市販の画像解析ソフトHALCONを用いて画像解析を行い数値化することとした。Fig. 5に計測の全体的な流れを示す。
Fig. 3 Riser model in RIAM
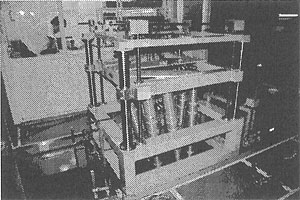
| Fig. 4 |
Parallel mechanism to control the upper end of the riser model |
Fig. 5 Measurement flow of the motion
Fig. 6 Overview of CCD camera frame
Fig. 7 Arrangement of measuring marker
Table 1 Characteristics of the riser model
| Model length |
|
6.5 (m) |
| Outer diameter |
|
22.5 (mm) |
| Inner diameter |
|
12.7 (mm) |
| Mass per length |
|
0.4 (kg/m) |
| Young's Modulus |
|
8.847 (MPa) |
| Bottom weight in water |
|
3.489 (N) |
|
6. リエントリー制御実験
本論文で行ったリエントリー実験は、管をx軸方向に0.3m離れた地点を目標点として制御するものである。その際、次の要求が満足されなければならない。
1. 迅速に目標点に到達し、振動発生を防止する。
2. 過大な制御入力を要求しない。
3. 上端部傾斜角を許容範囲内(3deg)に押さえる。
一つ目は作業効率、二つ目は船舶等に装備されたスラスタなどの性能限界、三つ目はライザー中を通るドリルパイプとライザーが接触して破損する可能性からくる安全面からの要求である。本論文で行った実験において、上端部傾斜角を計測することができなかったため、本論文においては、1、2の要求に着目して実験を行った。
本論文で行った実験は、画像計測処理のリアルタイム性がないために、予め、管上端部の動きを数値シミュレーションにより計算し、その動きをパラレルリンクで実現するという実験手法を採用した。したがって、この実験方法では、本来の閉ループ系の挙動を得ることはできないのであるが、シミュレーションで扱った運動方程式は事前の動力学実験により十分に検討されたものであるために、本実験においても閉ループ系の検証が十分に可能であると考えられる。また、制御方向と垂直方向への影響を実験により確認することも、意義あるものと考えている。
|