|
7. 実験データの画像解析
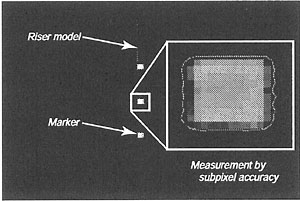
実験データの画像解析の方法について説明する。本論文においては、以下の処理を画像解析ソフトHALCON5)を用いて行った。マーカー計測は、まず、動的闘値処理を用いて大まかに抽出し、抽出されたマーカーに膨張処理をかけ、膨張された領域内でサブピクセル精度のエッジ検出を行い、最後にその部分を長方形近似し、重心の座標をメモリに格納する方法で行った。動的閾値処理とは原画像に平滑化処理を掛け、その平滑化画像の輝度分布にオフセットを付加した閾値で閾値処理してコントラストの高い部分を抽出する2値化処理のことで、本実験のように輝度の高いマーカーを抽出する場合は、原画像の輝度をf(i,j)、平滑化画像の輝度をfm(i,j)、オフセットをaとすると2値化画像fb(i,j)は(9)式を用いて得られる。ここで、i,jは画素座標を意味する。
Fig. 8に平均化処理を行った平滑化画像を示す。HALCONではサブピクセル精度のエッジ検出が可能であるので、より高い精度の計測を実現することができる。サブピクセル精度の計測結果をFig. 9に示す。
Fig. 8 Smoothing image
Fig. 9 Image of the riser model
画像座標系でのマーカーの位置を世界座標系に座標変換するためには、キャリブレーションを行いカメラパラメータを決定しなければならない。座標系間の関係をFig. 10に示す。精度良く計測するためには計測範囲内でより多くのキャリブレーションマーカーを用い、座標系間の相対関係を求めることが必要になる。本実験では射影幾何学を利用した方法6)でキャリブレーションを行った。この方法は世界座標系での座標X=(X,Y,Z)Tと画像座標系での座標(u,v)Tの幾何学的な位置関係を透視投影行列Pを用いて直接対応付けするものであり、それらの座標は以下のように結びつけられる。
w[u,v,l]T=P[X,Y,Z,l]T (10)
wは0でない定数であり、(X,Y,Z,l)T,(u,v,l)Tといった表記は斉次座標と呼ばれる。斉次座標においては、座標を表すベクトルの0でない定数倍、すなわち(wu,wv,w)Tと(u,v,l)Tなどは同じ点を表すものとする。Pは3×4の行列で、その(i,j)成分をPijとし、(10)式のwを消去すると、空間と画像の座標の関係は、
と表される。行列Pの12個の成分を決定する際、(10)式で定数倍の自由度を許しているので、成分の一つを0以外の適当な数値で固定して、残りの11個を決定すれば十分である。世界座標系の1点の座標と画像座標系の座標とが与えられると、それらを(11)式に代入して2つの式が与えられる。本実験ではFig. 11の配置で各カメラ毎にxy平面上に13箇所、z方向に3点ずつ計39点キャリブレーションマーカーを設置し、P34=1とした上で、最小二乗法により行列Pを決定した。
画像座標と行列Pが求まると、ステレオ視の原理を用いてマーカーの3次元座標が決定できる。2つのカメラの画像座標系上の座標(u1,v1)T、(u2,v2)Tと、P1、P2を(11)式に代入すると、X,Y,Zについての連立1次方程式が得られる。ここで未知数3つに対して方程式は4つ与えられるので、マーカーの3次元座標は最小二乗法により決定した。
なお、本実験で使用した画像解析プログラムの位置推定誤差は、事前の検証により、2%程度内の位置推定誤差であることを確認しているために、本実験においての計測精度としては十分であると考えている。
Fig. 10 Camera coordinate systems
Fig. 11 Calibration marker's arrangement
8. 実験結果
XZ平面上での管の挙動をFig. 12に、管のXY平面における挙動をz=500,3500,6500mmの地点毎に表したものをFig. 13に、管先端部のX軸(制御)方向の時系列結果をFig. 14にそれぞれ示す。なお、すべては結果は無次元値として表記している。Fig. 15には、管上端部に働くX, Y軸方向の力の時系列の結果を示す。また、すべての結果において比較のためにLTI制御の結果も同時に付記する。
Fig. 12の結果から、LTI制御はLPV制御よりも目標点近傍での大きな振動が確認される。これは、前報4)で検証のため行った数値シミュレーションにおいても確認されていたスピルオーバ現象による振動であると考えられる。実験においては、数値シミュレーションで考慮できなかった低次減衰効果などにより、大きな振動は発生しないと考えていたが、先端部は予想以上に大きく揺れることが、Fig. 14の結果からも同時に確認された。また、LTI制御によるリエントリー時の管形状は、LPV制御のときに比べて大きく変形することも、Fig. 12の結果から確認される。
Fig. 13の結果からは、LTI制御はLPV制御と比較してy軸方向、つまり制御方向と垂直方向への大きなふらつきが顕著に確認される。この原因としては、管の持つ偏芯性や外部流れの影響なども理由として考えられるが、渦励振が大きな影響を与えているものと考えられる。渦励振をこの要因として考えた場合、この現象の1つの解釈として、LTI制御では、モデル変動下で閉ループ系の高周波数領域の伝達ゲインを常に低減化することができない結果、高周波数信号を拾い、渦励振を誘起させてしまったものと考えることができる。実問題においては、潮流や波浪など様々な周波数を含んだ外乱が存在するために、この渦励振の影響をどのように制御に反映させないかという問題は非常に重要である。
Fig. 15の結果は管先端部に働く力であるが、言い換えれば、船舶などの浮体部に要求される力であるため、必要な制御入力と解釈することもできる。そう考えると、LPV制御はコントローラ可変のため、目標点に近づくにつれ徐々に入力が減少される一方、LTI制御は持続的に大きな制御入力を要求しており、燃料消費の観点から考えると大きな問題である。
| Fig. 12 |
Experimental results of riser's sway motion in the reentry operation |
(a) LTI Control
(b) LPV Control
| Fig. 13 |
Experimental results of XY-plane motion in the reentry operation ((a): LTI, (b): LPV) |
| Fig. 14 |
Time histories of bottom point motion In control direction |
| Fig. 15 |
Time histories of top end forces Fx and Fy in the reentry operation ((a): LTI, (b): LPV) |
9. 結言
本論文では、前報4)の結果を踏まえ、検証のため九州大学応用力学研究所深海力学実験水槽において行った、リエントリー実験の結果を報告した。厳密な閉ループ系の実験結果ではないが、LPV制御は、LTI制御で確認されたようなスピルオーバ現象や大きな形状変形などをすることなく、リエントリー制御に対して有効な方法であることを実験により確認することができた。
今後は、画像計測処理のリアルタイム性を有する環境下での実験、潮流などの外乱影響がある中での、リエントリー作業についての検討が課題である。
謝辞
著者の大坪は、造船学術研究推進機構からの支援の下で研究を遂行した。関係者各位に改めて謝意を表します。
参考文献
1) W. Koterayama and H. Senga: Vortex Induced Vibration of a Long Riser Oscillating Regularly and Irregularly at its upper end, Proc. of UDOE, Tokyo, Japan, Feb, (2005)
2)鈴木英之, 吉田宏一郎, 南東浩, 村井基彦, 宇佐美陽生, 石田成幹: アクティブ制御による大水深ライザーのリエントリー問題に関する研究, 日本造船学会論文集, 第174号, (1993), pp.865-874
3) M. P. Fard: Modeling and Control of Mechanical Flexible Systems, Ph.D thesis, Norwegian University of Science and Technology, (2001)
4)大坪和久, 五百木陵行, 梶原宏之:速度変動に伴う流体抗力の影響を考慮した大水深ライザー管のゲインスケジューリング制御, 西部造船会第110回例会, (2005), pp.37-42
5)株式会社リンクス:HALCON活用法, (2004)
6)出口光一郎:ロボットビジョンの基礎, コロナ社, (2000)
|