|
6.2 大型ブイ(浮体式海洋構造物)に接舷した場合
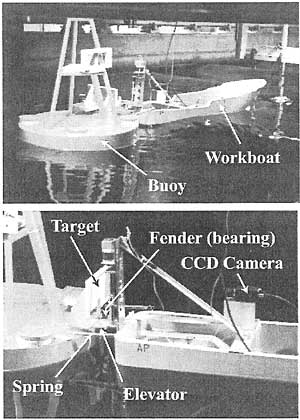
実験状態をFig. 18に示す。支援船模型はコイルバネ、摩擦力が働かないフェンダーでブイ模型に係留されている。
| Fig. 18 |
Experimental set-up (Workboat and ocean observation buoy) |
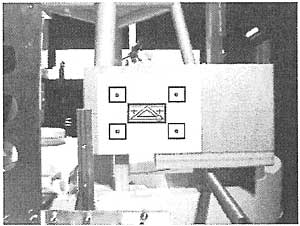
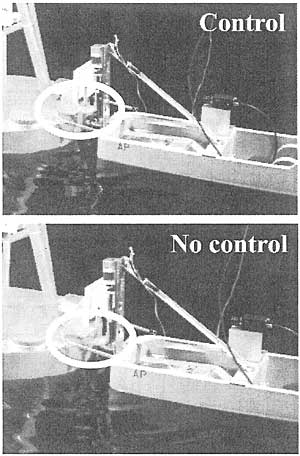
Fig. 19に模型船上のCCDカメラで撮ったターゲットの画像処理中の映像の一こまを、Fig. 20に乗船装置を駆動した(制御を行った)場合と、駆動しなかった場合の状態を示す。ターゲット、カメラがともに運動する場合でも画像処理が正常に行われ(抽出された4つの黒丸のそれぞれの中心が白い十字マークで示されている。)、制御を行った場合は乗船装置のエレベータ部分とブイの乗船用デッキのレベルがよく一致していることがわかる。
| Fig. 19 |
Image captered with the CCD camerat and extracted points |
| Fig. 20 |
Photo of model experiments (Workboat and ocean observation buoy) |
Fig. 21は実験で使用した規則波の波長と波高の関係、計測された相対変位振幅である。浮体式の海洋構造物に接舷した場合の相対変位は固定式の海洋構造物に接舷した場合に比べて、波周期の短い領域で大きく、波周期が長くなってもさほど大きくならず、予測されたことではあるが、特性が非常に異なることがわかった。
Fig. 22に計測された規則波中(λ/L=1.25、5.0)における構造物と支援船の相対変位、乗船装置の移動量、誤差の時系列の一例を、Fig. 23に規則波中実験より得られた乗船装置の移動量と相対変位の比、誤差の周波数応答を示す。海洋構造物が運動しても、画像処理による相対変位計測が安定して行われ、可動式乗船装置も相対変位に(誤差無く)よく追従して動いている。固定式海洋構造物の場合と動特性の大きく異なった系に対して、固定式海洋構造物に対して設計したコントローラーを使用しているにもかかわらず、位相差を含めて誤差はほぼ全周波数領域で非常に小さいことがわかった。波長が非常に短い領域で誤差が若干大きくなり、位相のずれが見られるが、波長の短い領域では(一般的に)波高も非常に小さく、この程度の誤差は問題にならないと考えられる。
| Fig. 21 |
Regular waves used in experiments and relative displacement between workboat and ocean observation buoy |
| Fig. 22 |
Time series of relative displacement between workboat and ocean observation buoy and motion of elevator in regular waves |
| Fig. 23 |
Error of motion of elevator (Workboat and ocean observation buoy) |
最後に不規則波.(有義波高:74.8mm、平均波周期:1.9秒)中での実験結果をFig. 24に示す。不規則波中においても規則波中と同様、可動式乗船装置は相対変位に精度よく追従しており、誤差は非常に小さい。
| Fig. 24 |
Time series of relative displacement between workboat and ocean observation buoy and motion of elevator in irregular waves |
|