|
6. 模型実験結果及びその考察
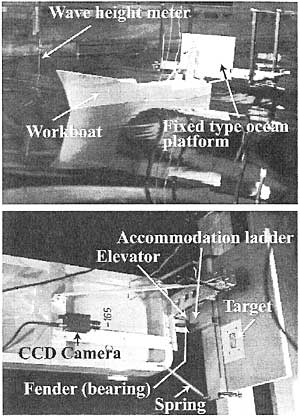
可動式乗船装置システムの機能(主として画像処理による相対変位の検出が動揺する支援船に設置されたCCDカメラで行え、ビジュアルフィードバックが可能かどうか)・性能(制御の方法と制御ゲインが性能に及ぼす影響)を検証する為に、模型実験が九州大学応用力学実験所深海機器力学実験水槽(長さ:65m、幅:5m、深さ:7m)で行われた。固定式海洋構造物(Fig. 1)に接舷した場合と浮体式海洋構造物(大型ブイ)(Fig. 2)に接舷した場合では構造物と支援船間の相対運動が大きく異なると考えられるので、実験は2状態について行われた。いずれの場合も実験は追い波状態(構造物から支援船の方向に波が進行する)で行われた。実際の作業従事者からの聞き取り調査によりこの状態を決定したが、斜め波中での性能評価は今後の課題としたい。
6.1 固定式海洋構造物に接舷した場合
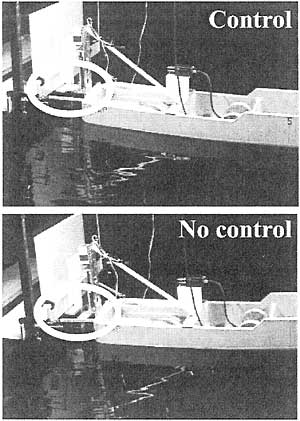
実験状態をFig. 10に示す。実海域では、支援船の推進器を駆動し、その推力で船体を構造物に押し付けるように接舷して作業を行うが、模型実験では簡単の為、支援船模型を固定式海洋構造物を模した要素模型にコイルバネで係留した。なお、フェンダーはベアリングを使用して摩擦力が働かないようにしたものを使用した。Fig. 11に乗船装置を駆動した(制御を行った)場合と、駆動しなかった場合の状態を示す。制御を行った場合は乗船装置のエレベータ部分と海洋構造物の乗船用デッキのレベルが一致していることがわかる。
支援船と構造物の相対変位は画像処理システムにより精度良く計測されるので、可動式乗船装置はその相対変位を打ち消すように動けばよい。可動式乗船装置にはサーボシステム(下位コントローラー)が組み込まれ、変位指令に従って動くため、変位指令を発生する上位コントローラーにはフィードフォワード制御が採用されている。下位コントローラー、上位コントローラーからなるシステムを構築することはシステムの信頼性、保守性からも有利であると考えられる。
上位コントローラーの発生信号Vin、は、構造物と支援船の相対変位Yrを用いて、次式に従って作られる。
Pは比例ゲインであり、乗船装置サーボシステムへの入力電圧と乗船装置の移動変位の関係から得られる定数である。また、Dは微分ゲインであり、応答特性の改善に使用される。
| Fig. 10 |
Experimental set-up (Workboat and fixed type ocean platform) |
| Fig. 11 |
Photo of model experiments (Workboat and fixed type ocean platform) |
Fig. 12、13にDが構造物と支援船の相対変位振幅Yraと乗船装置の移動量振幅Yeaの差(誤差)ΔYa及び位相差εYeにおよぼす影響を示す。実験は規則波(λ/L=1.25、λ: 波長、L: 模型船長さ)中で行われた。D=0.005の場合、誤差・位相差が最少になり、制御性能が最も優れていることがわかる。従って、以後の実験はすべてこの値を用いて行われた。実機の場合、画像処理の遅れは40ms程度と動揺周期にくらべて非常に小さいので無視できると思われるが、微分ゲインの設定については実機エレベーターの動特性が大きく異なると考えられるので設定しなおす必要がある。その際、(駆動方法の違いによっても動特性が異なると考えられるので)実機の試設計に基づく運動系のシミュレーションが不可欠となる。この点については実用化に向けた今後の重要課題としたい。
| Fig. 12 |
Effect over error of coefficient D in Eq. 1 (a) |
| Fig. 13 |
Effect over error of coefficient D in Eq.1 (b) |
Fig. 14に実験で使用した規則波の波長と波高の関係、計測された相対変位振幅を、Fig. 15に計測された規則波中(λ/L=5.0)における構造物と作業船の相対変位γr、乗船装置の移動量Ye、誤差ΔY(ΔY=Yr-Ye)の時系列の一例を示す。相対変位は波周期が長くなるに従って大きくなること、画像処理による相対変位計測が破綻なく安定して行われ、乗船装置も相対変位に(誤差無く)よく追従して動いていることがわかる。
Fig. 16は規則波中実験より得られた乗船装置の移動量と相対変位の比、誤差の周波数応答である。乗船装置の移動量と相対変位の比の値は全周波数領域でほぼ1であり、位相差も0であることから、可動式乗船装置は実験を行った全周波数領域で良好な性能を示すことがわかる。λ/L=1.5で相対変位が波振幅の約2倍と最大になるが(Fig. 14)、この場合でも誤差は非常に小さい。
| Fig. 14 |
Regular waves used in experiments and relative displacement between workboat and fixed type ocean platform |
| Fig. 15 |
Time series of relative displacement between workboat and fixed type ocean platform and motion of elevator in regular waves |
| Fig. 16 |
Error of motion of elevator (Workboat and fixed type ocean platform) |
以上は規則波中での実験結果であるが、Fig. 17に不規則波(有義波高:74.0mm、平均波周期:1.9秒)中での実験結果を示す。不規則波中でも可動式乗船装置は不規則に変動する相対変位に精度よく追従しており、誤差は非常に小さい。固定式の海洋構造物に対して乗船装置を駆動した結果、実験を行った全周波数領域、不規則波中で装置は良好に機能し、微分ゲインDも運動周期にかかわらず一定としてよいことがわかった。
| Fig. 17 |
Time series of relative displacement between workboat and fixed type ocean platform and motion of elevator in irregular waves |
|