|
7. 画像処理のロバスト性
室外で画像処理システムを使用するには環境(明るさ)変化に対してロバスト8)であることが不可欠である。CCDカメラにより撮影される画像の平均グレー値が設定した最適な値に保たれるようにカメラレンズの絞りを自動制御すること、カメラのシャッタースピードを明るさにより自動的に変更することにより形状パターンマッチング、Pose Estimation法による3次元運動計測のロバスト性を大きく向上できた。
実験は前述の深海機器力学実験水槽に付属するフロアーで行われ、南西に面した実験棟のシャッターを開閉することにより計測環境の明るさを変化させた。実験を実施した8月は1年を通じてもっとも日射量が多く、11時から16時にかけて光がフロアーに差し込むので、シャッターの開閉により大きな明るさの変化が得られ、シャッターを全開した場合は、ターゲットを野外に置いた場合とほぼ同じ環境となる。ターゲットを強制動揺装置に取り付け、片振幅30度、周期1.4秒で回転運動させ、計測環境の明るさを変化させながら運動計測を行った。ターゲットは動揺装置の回転軸から286mmの位置に取り付けられているので、水平方向にも片振幅143mmで並進運動をすることになる。
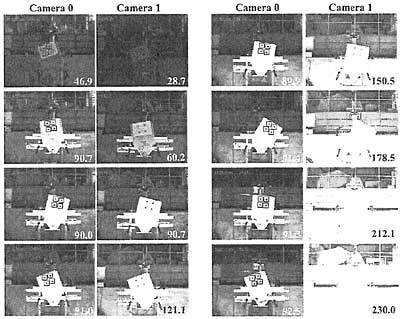
| Fig. 25 |
Gray value under brightness change (Iris diaphragm value is controlled) |
Fig. 25にCCDカメラで取り込まれた画像を示す。Camera 0は絞りを制御したカメラの画像、Camera 1は制御を行わないカメラの画像であることを表している。図中の数字は画像の平均グレー値である。計測環境の明るさが変化すると、制御を行っていないCamera 1の画像の平均グレー値は変化し、平均グレー値が180を超えると画像全体が白くなってしまい、ターゲットが認識できない状態となる。これに反し、制御が行われているCamera 0の画像はオリジナルの状態(平均グレー値:90)をよく保っている。計測開始状態より暗くなった場合は、Camera 1の画像の平均グレー値が50となった時点で、Camera 0の絞りが開放状態になってしまった。従って、この状態よりさらに暗くなった場合は制御がきかず、Camera 0の画像の平均グレー値の値も小さくなってしまう。しかしながら、画像処理法そのものにある程度のロバスト性があるため、平均グレー値が45程度になるまでは計測可能である。絞りが開放になった時点でシャッタースピードを下げ、絞りを絞る方向に絞り値をシフトすることも考えられるが、速い運動の計測に不利であると考え、実施していない。
運動計測結果の時系列をFig. 26に示す。図は上から、水平方向運動計測結果、回転運動計測結果、Camera 0(絞りが自動制御される)で取り込まれた画像の平均グレー値、Camera 1(絞り固定)で取り込まれた画像の平均グレー値、Camera 0の絞り値、水平方向運動振幅の誤差、回転運動振幅の誤差、実際の運動との位相差(時間遅れ)を示している。
| Fig. 26 |
Dynamic measurement precision under brightness change (Iris diaphragm value is controlled) |
明るさ(Camera 1の画像の平均グレー値)が大きく変化してもCamera 0の画像の平均グレー値はよく一定値を保っている。また、この間、運動計測時系列に乱れはなく、計測誤差も回転運動・並進運動ともに1%以下である。時間遅れも運動モード・明るさにかかわらず一定である。絞りの自動制御によりロバスト性が大きく向上していることがわかる。
予備実験中は天候に恵まれたものの、本実験中は台風の接近にともない、雲の多い日が続いたため、実験棟のシャッターを全開してもCamera 1の画像の平均グレー値が250(画像が完全に真っ白になる状態)を越す機会を得ることができなかった(Fig. 26)。このため、シャッタースピードの変更にいたらず、シャッタースピードが変更された場合の過渡応答を調べることができなかった。シャッタースピードの変更は、急激な明るさの変化と等価であり、絞りの制御・計測結果に及ぼす影響が大きいと考えられる。そこで、シャッタースピードを変更する平均グレー値の値を250から150に変更し、実験を行った。結果をFig. 27に示す。t=22秒でCamera 1の画像の平均グレー値が150に達し、シャッタースピードの変更に伴って値が急減し、その後再び(実験棟のシャッターが上がるにつれて)緩やかに増加していることがわかる。Camera 0の画像の平均グレー値はシャッタースピードが変更された瞬間若干変動するが、よく設定値を保っている。絞り値はシャッタースピードの変更で瞬時に(安定して)開放側にシフトし、その後明るさの増加に従って穏やかに増加している。また、シャッタースピード変更時にも運動計測時系列はほとんど乱れることなく、計測誤差も1.5%以下である。絞りの自動制御性能は十分満足できるものであり、画像処理システムが野外においても使用可能であることが確認された。
| Fig. 27 |
Dynamic measurement precision under brightness change (Iris diaphragm value and shutter speed are controlled) |
8. 結言
波浪中で海洋構造物・支援船間の安全な移動を確保することを目的とした可動式乗船装置の概要を提案し、システムの機能・性能を検証する為の模型実験を行った結果、次の結論を得た。
(1)1台のカメラで行えるPose Estimation法を用いた画像処理による3次元運動計測は海洋構造物と支援船間の相対変位計測に精度よく利用可能である。
(2)支援船に設置されたCCDカメラによる映像の画像処理で得られた相対運動情報を可動式乗船装置の制御に使用することで、海洋構造物側にターゲットプレートを設置する必要はあるものの、特別なメンテナンスを必要とする複雑高価な装置設置が回避でき、システムの汎用性を向上することができる。
(3)研究を行った可動式乗船装置は、模型実験においては固定式海洋構造物に接舷した場合も浮体式海洋構造物に接舷した場合も同一のコントローラーが使用可能で、構造物・支援船間の相対(上下揺)変位に同調して動き、安全な移動の可能性が示された。
(4)実用化に向けては実機の試設計に基づく運動系シミュレーションによるコントローラーゲインのチューニングが必要である。
(5)画像処理の環境(明るさ)変化に対するロバスト性能は、カメラの絞り制御・シャッタースピード制御を行うことで飛躍的に向上し、システムの室外使用が可能である。
今後、相対変位が乗船装置の可動範囲を超えた場合の制御方法、エレベーターの人間工学的に安心感のある上下移動、支援船のDPSを含めた総合的なシステムヘの拡張等について研究を進めて行きたい。
謝辞
研究を進めるにあたって、稲田勝氏(九州大学応用力学研究所)、村田剛氏(株式会社リンクス)の協力を得ました。また、模型船製作にあたって、星野邦弘氏(海上技術安全研究所)より提供していただいたライン図をモディファイして使用させていただきました。ここに深く感謝の意を表します。
最後に、本研究は科学研究費補助金(14350527)によって行われたことを付記し、関係各位にお礼申し上げます。
参考文献
1) Koterayama, W. and Nakamura, M. “Drag and Inertia Force Coefficients Derived from Field Tests”, Int. Journal of Offshore and Polar Engineering, Vol.2, No.3, 161-167 (1992).
2) Koterayarna, W. Nakamura, M. Sato, K. and Ikebuchi, T. “Model and Field Experiments on a Wave Observation Buoy”, Int. Journal of Offshore and Polar Engineering, Vol.13, No.1, 21-28 (2003).
3)FEST Project編集委員会“新実践画像処理”、株式会社リンクス出版事業部(2001).
4) MVTec Software GmbH “Machine Vision in World Coordinates”, HALCON Application Note (2003).
5)原口富博, 二村正“ビデオトラッカーを用いた三次元運動計測法について”, 船舶技術研究所報告, 第22巻, 第5号, pp.547-569(1990).
6)中村昌彦、梶原宏之、眞鍋崇寛“画像処理を利用した海洋構造物模型の波浪中運動計測(その2 運動計測範囲の拡張と3次元運動計測)”、西部造船会会報、第109号、pp.13-24(2005).
7)中村昌彦、梶原宏之“画像処理を利用した海洋構造物模型の波浪中運動計測”、西部造船会会報、第108号、pp.73-83(2004).
8)中村昌彦、梶原宏之“画像処理による運動計測のロバスト性向上に関する研究”、日本造船学会第18回海洋工学シンポジウム(2005).
|