|
5. 海洋ゴミに関する技術的取り組みについて
国内外の海洋ゴミ集積技術及び運用等の実態調査を行なった。主な対象国及び調査項目は以下の通りである。
・調査対象国:日本、アメリカ、ドイツ、オーストラリア、フランス、英国、アイルランド等
・海洋ゴミ集積機械の仕様(性能、形状等)、運用形態
・岩礁、岩場等の危険地帯におけるゴミ集積機械、海藻等の集積機械、海藻とプラスチック等の分別機械、処理設備等
1)海洋ゴミ集積機械の仕様(性能、形状等)、運用形態
集積機械を使用しての運用形態は、各自治体にて清掃活動または民間業者で回収されている。主に海水浴場等の砂浜地区を対象にしたものである。
その例として、お台場海浜公園(東京都港区)で行われた海浜清掃・美化イベントがある。
図5.1〜図5.3に海洋ゴミ集積機械の仕様の一覧を示す。
2)岩礁、岩場等の危険地帯におけるゴミ集積機械、海藻等の集積機械、海藻やプラスチック等の分別機械
調査したが、岩礁等危険地帯の海洋ゴミの清掃例は見あたらず、人手による清掃作業が可能な場所で海藻、ゴミ等を回収し、分別しているのが現状で、該当する集積機械の例は見あたらなかった。
3)国内外の海岸清掃機械の運用に関する調査
国内外における海浜清掃機械の運用について調査を行ったが、ほとんどの国ではわが国と同様に機械による清掃作業は、自治体が民間業者に委託して行っている。
NPOやボランテアが、組織的に機械による海岸清掃までたずさわっている例は見あたらなかった。
機械による清掃作業で集めたゴミの管理・処理を自治体が実施しているプログラム例が多い。
(1)米国及びカナダ
(米国)
・廃棄物発電:ハワイの海岸管理プログラム及びH Power
ハワイでは、海洋資源及び海岸資源の保護のために海岸管理プログラムが実施されており、海や海岸から回収された魚網などのゴミは廃棄物発電所であるH Powerに送られ、処分されている。
搬入されたゴミは、電磁石で金属を、スクリーンで砂などが除去され、その後にシュレッダーでせん断され、ボイラーで燃焼される。そして、ボイラで発生された蒸気によって発電が行なわれている。
ゴミの年間処理量は、60万トンで、オアフ島の電力の7%を発電している。
(カナダ)
(2)Clare Organic Products社:ピートモスと海草をブレンドした肥料
カナダのClare Organic Products社では、魚の廃棄物を貴重な資源へと変換するための方法を開発し、現在では、ピートモスと海草をブレンドした肥料を製造している。同社では、付加価値を付けることに努めている。
(2)フランス
・ガスコーニュ湾海浜浄化プログラム
フランスのガスコーニュ湾では、海辺のゴミの問題が顕在化し、1991年以降、協議会は設置され、ゴミ清掃のための総合的なプログラムが実施されている。
回収されたゴミの内、木材はエネルギー源として利用され、残ったその他の廃棄物は焼却施設で焼却されている。
また、1999年以降、モニタリング及びゴミ処分の効率的な管理のために、21種類の新たな仕事が創出されている。
(3)オーストラリア
・Port Stephens Councilの清掃活動及びBedminster Co-composting技術
ニューサウス・ウェールズでは、海岸での手作業によるゴミの回収作業が行なわれているが、ゴミの処分方法は主に、埋立である。ただし、一般廃棄物などのための処分方法として、コンポスト施設もある。
・ビクトリア州海浜清掃良好事例ガイドブック
ビクトリア州では、海浜清掃のための良好事例ガイドラインを公表しており、海洋ゴミの処分方針については、「リデュース、リユース、リサイクル」を掲げている。有機物の埋立ても一つの方法であるが、温暖化ガスであるメタンが発生するために、海辺に戻すことが生態系にとっての補充となり好ましいという。代替案として、廃棄物のコンポスト化あるいはメタンを回収できる埋立サイトでの処分があげられる。
(4)英国
ワイ・カレッジでは、実規模のコンポスト施設が建設され、1990年以降、研究が行なわれている。ここでは、高温のコンポスト・プロセスを利用した有機廃棄物のリサイクルに関する技術的なコンサルティングが行なわれている。研究されている有機廃棄物は、海藻、下水スラッジ、農業廃棄物や発酵廃棄物と広範囲である。(添付資料6)
(5)アイルランド
海草の工業的な用途について、以下のようなものをあげられている。
農業 :生の海草、また、副産物が使用されている。例えば、肥料。
それらは動物飼料などを生産するために処理される。
工業 :アルギン酸は、繊維産業の中で特に使用されている。
その他:化粧品の素材としての利用がある。
【収集資料】
1. (株)小松製作所:ビーチクリーナ
2. 川崎重工業(株):ビーチクリーナ
3. 松山(株):ビーチクリーナ
4. (アメリカ)H.Barber & Sons社:ビーチクリーナ
5. (アメリカ)Beach Trotters社:ビーチクリーナ
6. (アメリカ)Cherrinton社:ビーチクリーナ
7. (ドイツ)Kassbohrer Gelandefahrzeug AG社:清掃機械
8. (アメリカ)廃棄物発電:ハワイの海岸管理プログラム及びH Power
9. (カナダ)Clare Organic Products社:ピートモスと海草をブレンドした肥料
10. (フランス)ガスコーニュ湾海浜浄化プログラム
11. (オーストラリア)Port Stephens Councilの清掃活動及びBedminster Co-composting技術
12. (オーストラリア)ビクトリア州海浜清掃良好事例ガイドブック
13. (英国)ワイカレッジのコンポスト施設
14. (アイルランド)海岸漂着海草利用プログラム
海洋ゴミ集積機械に関して調査(5.1.1項)した結果、海浜清掃装置としては、砂浜専用のビーチクリーナ又は、農耕用のトラクターに専用のアタッチメントを装備し流木等を回収する機械のみで、岩礁地帯へ対応した回収機械は世界的に見ても存在しない。
そのため、わが国の沿岸地域における漂着ゴミの清掃作業は、NPOや環境に関心のあるボランティア組織・団体等が、地域住民や小中学生を集め、海水浴場等の平坦な砂浜地域を人手による清掃活動を行っている。
台風や荒天時に大量に漂着する海洋ゴミは、自治体が民間業者に委託して専用の海浜清掃機械やブルドーザー、ショベルカー等の機械により清掃を行っているレベルに限られ、岩場、崖等の岩礁地帯のゴミは、放置されているのが実情である。 しかし、多くの岩場や岩礁地帯は、海岸線の中でも日本的な美しい風光明媚な景勝地にあり、陸から海を見下ろすと岩礁の隙間に大量のゴミが堆積・散乱している風景は、日本の貴重な観光資源を失うと共に、水際の海洋生態系も破壊していることになり大きな問題である。そこで、ここでは岩礁地帯清掃用のロボットシステム概念の取りまとめを行い、その実現性について検討を行った。
岩礁地帯での問題点としては、(1)足場が不安定な不整地 (2)機器の運搬が困難(3)回収したゴミの運搬も難しいという点である。そこで、そのような問題を解決する為、不整地走行が可能な多足マニピュレーターによりバキューム吸引ホースを移動させ、ゴミを吸引・回収するシステムについて検討する。バキューム車を利用する事により、運搬設備の整わない岩礁地帯でもスムーズなゴミ回収作業が可能であるが、バキューム車が入れない事も考慮し、減容装置という展開も含め検討した。
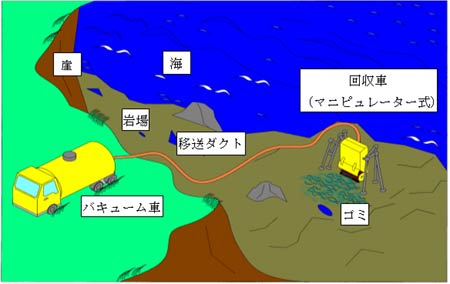
(1)システムイメージ(1)(図5.4参照)
マニピュレーター式の回収車(不整地走行ロボット)にてゴミを回収し、バキューム車にて吸引し処理場まで搬送するシステム
(2)システムイメージ(2)(図5.5参照)
クローラ式の回収車にてゴミを回収し、バキューム車にて吸引し処理場まで搬送するシステム
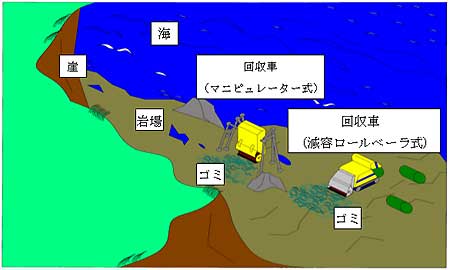
(3)システムイメージ(3)(図5.6参照)
ベーラ又は、マニピュレーター式の回収車にてゴミを回収し、減容するシステム
図5.4 マニピュレーター式の回収車+バキューム
図5.5 クローラ式の回収車+バキューム
図5.6 回収車+減容ロールベーラ
a. バキューム車
回収したゴミを効率よく処理場まで運搬する車両としてバキューム車が利用できる。
・主なバキューム車の用途
側溝及び下水管渠の清掃
沈殿槽、原水槽、放流槽等 排水処理
施設の清掃
油水分離槽の清掃
工場施設のダスト(粉物体)等の清掃
b. 多足ロボットシステム
不整地を走行するマニピュレーターとしては、ヘビ形ロボットや6本足で移動する多足ロボットがある。このタイプのロボット用途は地雷撤去をメインに使用されており、砂漠地帯や不整地歩行を前提としているので、岩礁地帯での走行への転用は十分可能である。
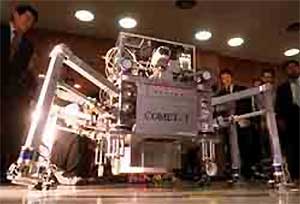
○地雷探知ロボットの例(千葉大学の例)
ロボットは幅約1・2メートル、高さ約1メートル、重さは約120キロのアルミ製。ロボット本体に装備されたCCD(電荷結合素子)カメラと赤外線カメラは操縦者へ無線で映像を送り、それを見ながら操縦者が障害物などを避けるように無線操縦する半自律型ロボットで、6本の足にはそれぞれ超小型化された高性能な金属探知器が装着されており、前進するときは足が地面に着地する直前に地上約2センチのところでいったん止まる。もし金属反応があるときにはその地点を回避し、地雷であることを確認すれば塗料を地面に吹き付けて印を付ける。同時に、GPS(全地球測位システム)を使い誤差1センチの精度で地雷の位置を確定し、計測結果を搭載コンピューターとホストコンピューターの両方に記録する。
時速20メートルとゆっくりした動きだが、人間だと1日6時間働いても数メートル進むのが限度。ロボットは24時間稼働させ約500メートル進むことができる。確実に対戦車地雷を取り除いた後、大型重機で対人地雷を破砕できるので大幅な効率化につながる。
現在、地雷探知以外の作業が可能な2本のマニピュレーターを付けたロボットを開発中である。
千葉大学で開発中のロボット
c. ロールベーラ
牧草・稲わら梱包機械のロールベーラを応用し、海藻等を回収梱包する用途に利用可能である。(但し、対海水対策が必要)
ロールベーラ(スター農機株式会社)
作業中のロールベーラ
多足マニピュレーターを利用した岩礁地帯のゴミ回収システムに必要な技術、装置は既に研究・実用されているものが利用できるが、どの装置も海洋ゴミの回収を主目的としたものではなく、小型化、耐海水対策等の改造が必要である。
今後の課題を下記にまとめる。
【ゴミ回収装置のロボット開発】
(1)不整地走行ロボットの開発及び試験
(2)適応した採取部(マニピュレーター等)の開発及び試験
(3)遠隔制御・監視部の開発及び試験
(4)海水対策
【集積・輸送装置のシステム確立】
(1)真空吸引の評価
(2)不整地搬送車の開発及び試験
(3)回収梱包の評価
(4)遠隔制御・監視部の開発及び試験
(5)海水対策
【システム全体検討】
(1)操作方法(目視/自動、無線/有線等)
(2)機材(機械)の運搬、搬入、撤収方法
(3)機材(機械)の保管、管理
|