|
(b)K−GPS測量による楕円体高データを用いた処理
動揺データを用いた処理を行った後も水深の段彩図の境界(コンター)には蛇行パターンが出力されることがある。この蛇行パターンの除去について、KGPS測量による楕円体高データを用いた処理を検討する。
マルチビームデジタルデータの処理では、測量船の上下方向の振動に対する補正を高周波成分である動揺センサーで取得したヒーブデータと低周波成分である潮高データを使用する・一般に動揺センサーは、20秒〜30秒より長い周期を取得することができない。そのため、マルチビームデジタルデータを処理し作成した水深図には、動揺センサーのヒーブデータと潮高データで取得できない周波数成分、つまり約30秒以上の上下振動のパターンが表われてしまうことがある。
| 図97 |
仙台湾測量実験における8月26日のK−GPS測量結果と潮汐結果とPOS/MV動揺センサーのヒーブデータの比較 |
一方、K−GPS測量による楕円体高データは、測量船の上下方向の振動に対して、低周波から高周波まですべての周波数成分のデータを取得することができる。そこで測量船の上下方向の振動の補正に対し、K−GPS測量による楕円体高データを使用して、マルチビームデジタルデータの処理を実施した。図97は、仙台湾測量実験において8月26日に収録したK−GPS測量結果、潮汐観測結果、およびPOS/MV動揺センサーで収録したヒーブデータの比較結果である。これよりK−GPS測量による楕円体高データが、潮高データおよびヒーブデータの両周波数成分をあらわしていることがわかる。
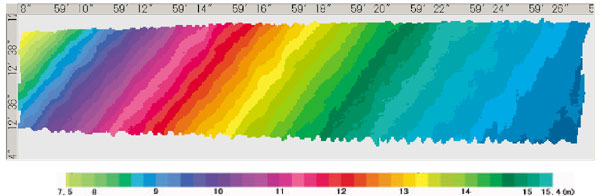
そこで、仙台湾測量実験において8月26日に収録したSeabat8125データに対してK−GPS測量による楕円体高データを使用して処理を実施した。ヒーブデータ及び潮高データを使用した通常の処理を行って作成した水深図を図98に、K−GPS測量による楕円体高データを使用して作成した水深図を図99に示す。両図は間隔20cmで作成したものである。図98には水深の境界に波状の長周期の振動と短周期の振動の2種類が表われている。一方、図99では長周期の波状のパターンがみられず、長周期の振動つまり蛇行パターンに対しては補正処理が実施できたと考えられる。但し短周期の振動についてはさらに検討を要する。
| (拡大画面:30KB) |
 |
| 図98 |
ヒーブデータおよび潮高データを使用して作成した水深図(間隔:20cm) |
| (拡大画面:30KB) |
 |
| 図99 |
K−GPS測量による楕円体高データを使用して作成した水深図(間隔:20cm) |
また、ヒーブデータおよび潮高データを使用して作成した水深図の隣り合う測線の水深差を示したものを図100に、K−GPS測量による楕円体高データを使用して作成した水深図の隣り合う測線の水深差を示したものを図101に示す。図の赤系の色は、水深差が10cm以下の部分を示し、黄緑は水深差が20cm前後の部分を示している。これらの測線はそれぞれ約3分20秒であるため、図100では、約30秒から1分からなる低周波の上限振動のパターンが表われている。これに対しGPS測量による楕円体高データを用いた図101では低周波による上下振動パターンがみられず、低周波の振動に対する処理が実施されているが、高周波成分による振動パターンが表われている。今回のK−GPS測量は、1Hzで収録を行っているのに対し、POS/MV動揺センサーによるヒーブデータは、10Hzで収録を行っている。このため、K−GPS測量による楕円体高データでは、高周波成分に対して、ヒーブデータほどの補正処理を行うことができなかった。しかし、低周波成分に対しての補正処理を実施することができるため、測量船の上下振動に対する補正方法として有効な方法であるものと考えらえる。また、K−GPS測量は、5Hz〜20Hzでデータを収録することが可能であるため、低周波から高周波まで収録したK−GPS測量による楕円体高データを使用することにより、取得される周波数に対して補正を実施することが可能であると考えられる。
| (拡大画面:37KB) |
 |
| 図100 |
ヒーブデータおよび潮高データを使用して作成した水深データの隣り合う測線の水深差の段彩図(間隔:5cm) |
| (拡大画面:39KB) |
 |
| 図101 |
図101 K−GPS測量による楕円体高データを使用して作成した水深データの隣り合う測線の水深差の段彩図(間隔:5cm) |
(c)傾斜計データを用いた処理の検討
船首支柱取り付けにより設置したSeabat8125は、取り付けた支柱を、ワイヤーにより船体に固定しているが、船体と同一の動きをしているかわからない。そこで、測深機の上部に傾斜計を取り付け、船体の動揺と測深機の動きを比較し、測深機の動きを把握することとした。
仙台湾測量実験では、船首支柱に設置したSeabat8125に傾斜計を取付、支柱の傾きデータを収録した。これをもとに傾斜計データの有効性について検討する。
傾斜計は、Seabat8125の上面に2個設置した。測深機の上面から見た傾斜計の設置図を図102に示す。
図102 Seabat8125の上面から見た傾斜計の設置図。
傾斜計は円筒形で、筒上の方向がz軸になる。計測するx軸、y軸はz軸に対して鉛直方向となる。上図に示すように、傾斜計(1)のx軸、y軸をx(1),y(1)、傾斜計(2)のx軸、y軸をx(2)、y(2)とする。
なお、傾斜計のデータ取得間隔は0.5秒であり、計測可能範囲は+5.00〜−5.00度の範囲である。また、x、yの正負の向きは、図106に示す向きである。
図103 x、yの正負の向き。
|