|
(2)マルチビームデジタルデータの処理プログラム
一般に使用されている浅海用処理ソフトウェアで作成した水深の段彩図には、各種処理を施した後になおも水深値の境界に櫛の歯状パターンまたは蛇行パターンが表われる場合がある。これらの現象は測量船或いは測深器の挙動が関与していると考えられている。そこで、測量船のデータの収録状況を考慮し、動揺データを用いた処理、K−GPS測量による楕円体高データを用いた処理及び測深器に取り付けた傾斜計データを用いた処理について検討した。さらに、これらの検討結果をもとに処理プログラムを作成した。
(a)動揺データを用いた処理
昨年度に引き続き、動揺データの取り扱いの影響により発生する櫛の歯状パターンの除去について検討する。
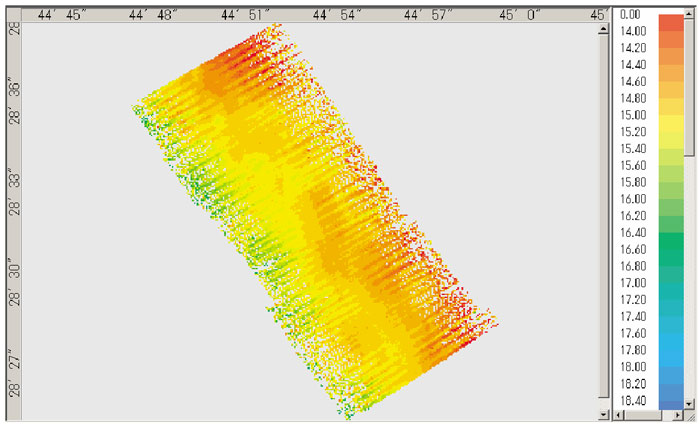
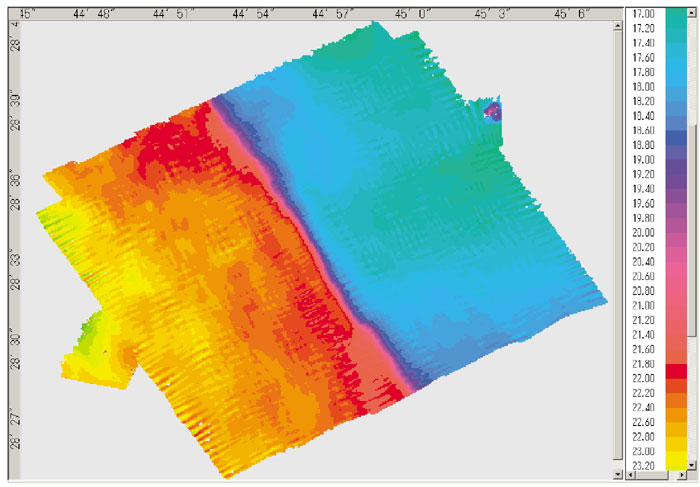
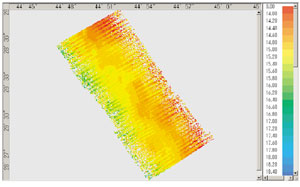
マルチビームデジタルデータを作成した水深図には、櫛の歯状パターンが出力されることがある。櫛の歯状パターンにはロールの影響と考えられるシーソー状のパターンとヒーブなどの影響による上下振動のパターンがある。扇島南東沖測量実験においてHYPACK MAXを使用して収録したSeabat8101およびSeabat8125データを処理し作成した図85、図86には、ロールの影響によるシーソー状のパターンが表われている。仙台湾測量実験において収録した図89および図90の水深図にも櫛の歯状パターンが表われている。このように全測線で示した場合には重なり合う測線によりこれらのパターンが複雑な形状を示し、判読しにくいので、1測線だけを抜き出して作成したそれぞれの水深図を図91示す。ここに示す櫛の歯状パターンを生成してしまう現象は、一般的にマルチビームデジタルデータの収録時刻と動揺データの収録時刻の差に起因した現象であることが知られている。これらを補正するためには、昨年度に実施した柱島南方海域で収録したデータに用いた方法と同様に動揺データの時間遅れの補正を実施する必要がある。
今回用いた時間遅れの補正は、マルチビームデータの収録時間を基準とし、動揺データの時間遅れを補正してデータをマッチングさせた。
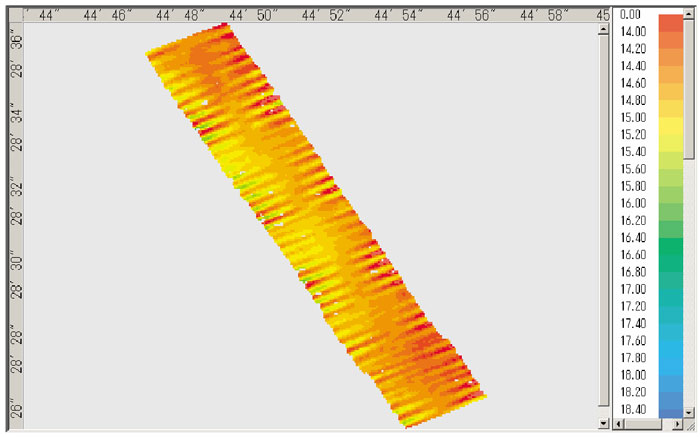
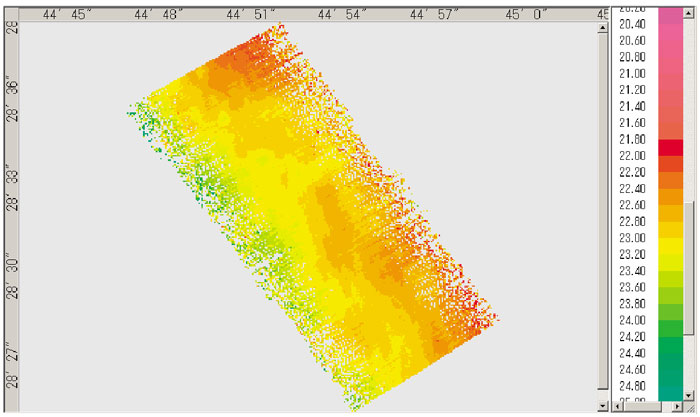
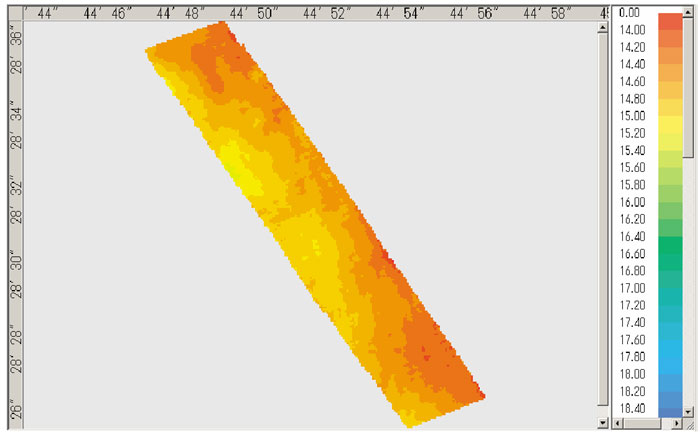
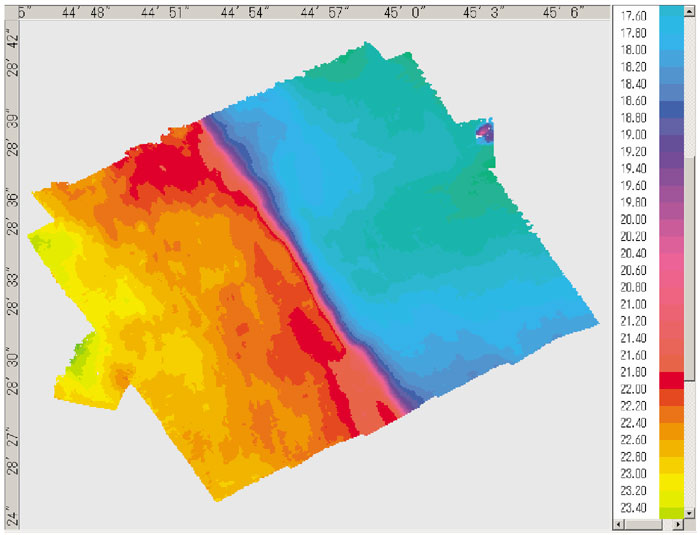
処理後の結果を図92に示す。また、Seabat8125で収録した全測線データに対して行った補正前および補正後の水深図を図93および図94に示す。これによると、補正前の水深図にはシーソー状のパターンが現れているが、補正後の水深図にはパターンの出現量が減少しデータの改善が見られる。
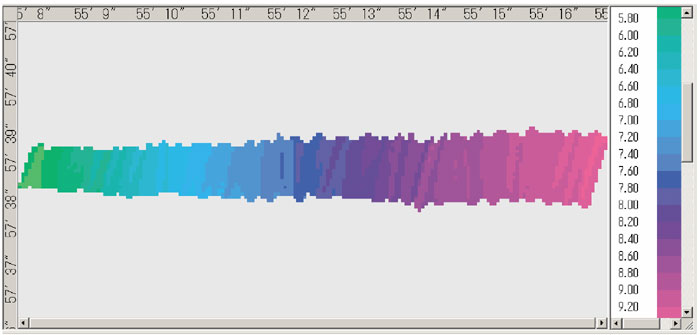
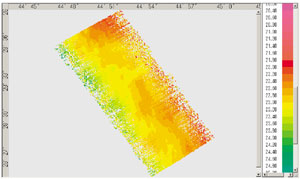
一方、仙台湾測量実験で収録したSeabat8125データを処理し作成した水深図には、扇島南東沖測量実験で収録したデータと異なり、ロールの影響によるシーソー状のパターンは見られない。扇島沖実験と同様に、全測線を重ね合わせたデータでは現象を把握しにくいので、1測線を抜き出して作成した水深図を図95に示す。これを見るとヒーブなどの影響による上下振動のパターンが表われている。
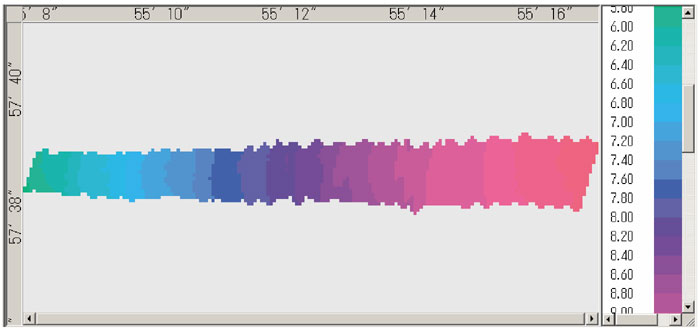
ここで用いたPOS/MV動揺センサーは、通常POS/MVと、被計測装置との関係を入力し装置内で自動的に計算処理するようになっている。しかし、ここでデータを収録した時にはPOS/MVを単独で船体の動揺データを収録することを目的としたため、動揺センサーからSeabat8125までの距離等の補正情報は入力していない。このため、動揺センサーデータ自体ではSeabat8125の運動は把握できていない。そこで、Seabat8125の設置位置における動揺データを再計算し動揺補正を実施した。処理後の結果を図96に示す。補正後の水深図より上下振動のパターンが改善されたことがわかる。
このように、短時間に多数回送受信する浅海用マルチビーム測深器では、測深器そのものの持つ特性を考慮するほか、周辺機器とのデータのマッチングに注意を払う必要がある。
| (拡大画面:65KB) |
 |
| (拡大画面:47KB) |
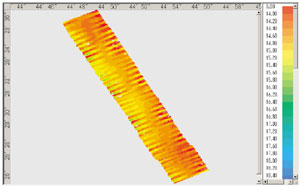 |
図91 1測線で作成したデータの水深図(補正前)
| (拡大画面:63KB) |
 |
| (拡大画面:38KB) |
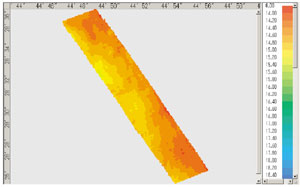 |
図92 1測線で作成したデータの水深図(補正後)
| (拡大画面:66KB) |
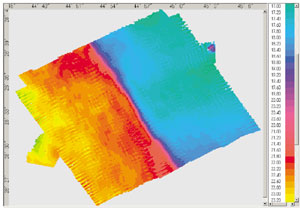 |
図93 Seabat8125で収録したデータの水深図(間隔:20cm)(補正前)
| (拡大画面:59KB) |
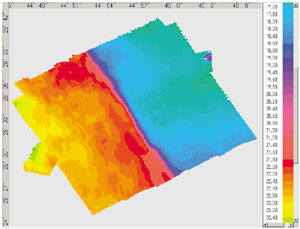 |
図94 Seabat8125で収録したデータの水深図(間隔:20cm)(補正後)
| (拡大画面:30KB) |
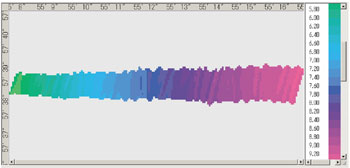 |
図95 1測線で作成したデータの水深図(間隔:20cm)(補正前)
| (拡大画面:27KB) |
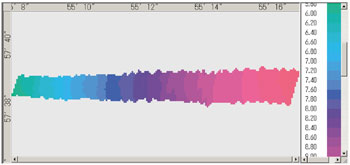 |
図96 1測線で作成したデータの水深図(間隔:20cm)(補正後)
上記に示した改善以外の情報としては、まず、扇島南東沖測量実験で使用したTSSDMSA2−05動揺センサーでは、動揺センサーとSeabat8101の関係の値が入力されている。これにより、Seabat8101の動揺補正が行われ上下振動パターンが表われなかったと考えられる。また、仮設で船首に支柱取り付けしたSeabat8125もSeabat8101と位置が近いため、同様な動きをしているものと考えられ、画像に表われるほどの上下振動のパターンが生じなかったものと思われる。
仙台湾測量実験では、HYPACK MAXを使用せず、GPS時計を用いて計算機内時刻を修正する収録専用パソコン(MBOH−604)ですべてのデータを収録した。この装置を用いることにより、機器自らデータ出力の時に時刻を送信するものに限らず、データだけ送信してくるものについてもGPS時刻という同一基準でデータを取得できる。これにより動揺データ収録の時間遅れが起きなかったため、シーソー状のパターンが生じなかったと考えられる。仙台湾測量実験で収録したSeabat8125データを処理した水深図に、シーソー状のパターンが表われなかったことから、本測量実験で実施したマルチビームデジタルデータと動揺データの収録時刻の差をなくして収録する方法は、水深図にシーソー状のパターンを起こさないための有効な方法の1つであると考えられる。一般的にシーソー状のパターンは水深が深いほど顕著に表われやすい。しかし、今回用いたデータの水深が20m以内と比較的に浅かったので、水深の深い所でのデータ収録も検証する必要がある。
|