4.画像衛星による海賊ハイジャック船追跡
衛星による監視技術を海洋監視に絞って概要紹介した。本題である海賊監視に適用するには、衛星高度から達成可能な探知精度(地上分解能)、軌道で定まる観測周期(頻度)を考慮し、衛星システムを含めた最適な解を見出す必要がある。
周回衛星で得られる現実の地上分解能と観測エリアの広域性から判断すると、カナダでの不法漁業対策に見るように登録船舶にIDデータを発信させ、観測船舶画像から登録船舶をマスクすることで不審船を浮かび上がらせる方法も考えられるが、対象海域には小規模な漁船が多く、そのほとんどが資金的にID発信トランスポンダを装備することが困難であることを考えると、個々の不審船を衛星画像で検出することは現実的には不可と判断せざるを得ない。むしろ商船、タンカーなどへのSHIPLOCないしはAIS搭載が今後普及していくことを考え合わせると、海賊襲撃の通報を受けて当該海域に監視リソースを集中し、衛星で被害船舶を捜索、探知・追尾することにより、沿岸国海事機関との連携によりハイジャック船舶を追いつめ、海賊行為を抑止することの方が現実的であると考えられる。以下ではこのための衛星システム、地上システムについての考察について示す。
4.1 衛星システム
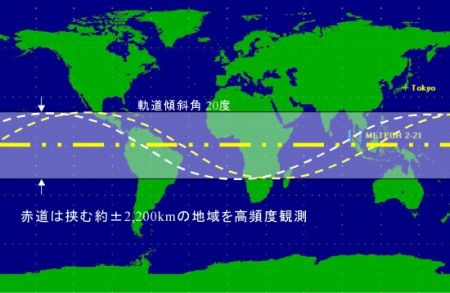
衛星は所要の分解能から静止衛星ではなく周回衛星とならざるを得ないが、従来の極軌道は3.1節に示したように地球全域を観測するように設定されているため、海賊出没頻度の高い赤道海域は衛星1機あたり2〜3日に1回程度の観測頻度しか得ることができない。これではたまたま直下またはその近傍に被害船舶を探知しても次に探知できるのは2〜3日後となって追尾の用を成さないことがわかる。観測頻度を増すためには衛星機体数を増やすことが一般に考えれられるが、ハイジャック船舶の航跡追尾には時間オーダ、できれば数10分オーダでの観測頻度が必要であることを考えると30〜60機の衛星が必要となり、費用的にもまた衛星管制上からもほとんど非現実となる。これを解決する方法としては、観測海域が赤道を中心とした緯度約20度の範囲であることを考慮し、赤道面に対する衛星軌道面の傾斜角(以下、軌道傾斜角)を10度〜20度の浅い角とする方法がある。この場合の衛星飛行域は図15に示すように赤道を挟むベルト状となり、衛星周回周期は極軌道周回と同様に約100分であるので、軌道傾斜角にもよるが、衛星1機あたり100分〜200分に1回船舶を探知することができる。図は軌道傾斜角20度の例を示し、正弦波状に示される隣接する軌道は1周回後の軌道を表す。
図15 赤道周回軌道による観測範囲
従って衛星機体数が2機の場合は50分〜100分おき、4機の場合は25分〜50分おきに当該船舶を繰り返し監視することができ、船舶搭載の自己位置発信装置が海賊により動作停止または破壊された場合においても追跡し追いつめることが可能となる。この場合衛星には通常の観測衛星と同様、図16に示すポインテイング機能を備えておき、対象海域に視軸を振り向けることにより広範な海域から当該海域を絞り込むとともに、後続の衛星に追尾を移管し、追跡を継続することが可能となる。
図16 衛星ポインテイング機能による監視海域の絞り込み
衛星搭載センサとしてはこれまでの説明から明らかなように、昼夜・全天候性の合成開口レーダが必須である。現行の商用合成開口レーダは地上分解能10m〜20mであるが、前述のとおり2003年には分解能3mが実現すること、これによりハイジャック船舶の形状識別精度が相当に向上することから、狭域観測モードでは観測幅10〜20km・分解能3m級、中域観測モードで観測幅50km、分解能10m、広域観測モードで観測幅300〜500km・分解能50mを備えることが望ましい。一方沿岸部や島嶼の陸域状況も写真判読等により把握しておく必要があり、また気象条件が許される範囲で追跡船舶の光学画像視認も必要であるので、昨今の商業高分解能衛星の技術的趨勢から、1m級の光学高分解能衛星も複数衛星の中に入れておくことが望ましい。この場合当該地域が雲で覆われて見えない割合が時間率にして70〜80%もあることを考慮すると、光学衛星に科す監視頻度は合成開口レーダよりも小となり、比率としては、光学対レーダ衛星数は1:2乃至1:3で十分と考えられる。