[73] 造船業務支援システムの開発と導入に関する考察
伊藤 健(三菱重工)
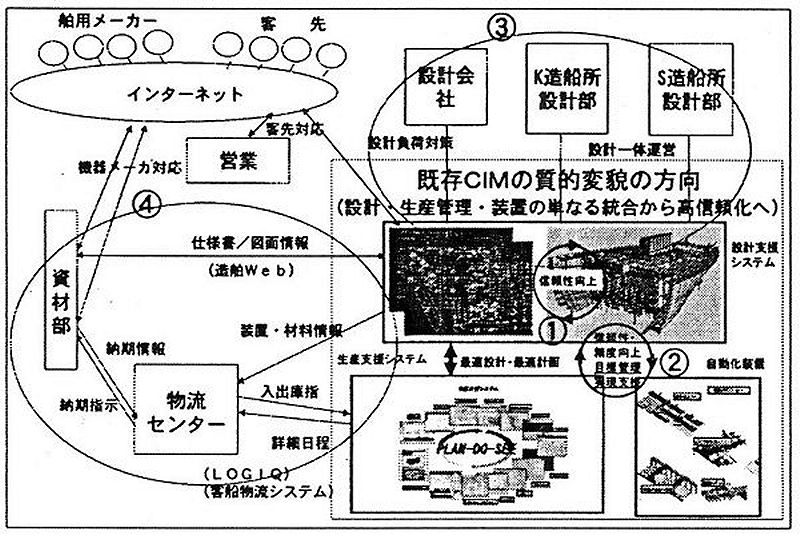
協業支援機能は造船業務支援システムに対する基本要件である。CORBA環境がこれを可能とすることを高度造船CIMプロジェクトで検証しモデルを提案した。一方, 造船業は開発されたシステムの実業務への導入に抵抗する風土を内在している。本論文で筆者は造船の業務を概観し, あるべきシステムを提案すると同時に, 既存システムの導入時にシステム推進者として実施した具体的な施策をまとめた。下図は, データ統合の枠組みが出来た既存CIMの高度化の現状を示し, CIMの効果が十分でない現状を脱却するためには, 業務の様々な場面で生ずる協業支援の要請に答え, 新たな工夫をすることの重要性を示している。
(拡大画面: 126 KB)
既存CIM高度化の現状
[74] ニューラルネットワークを用いた二浮体位置制御法の開発
小林英一, 松浦正巳(三菱重工)他
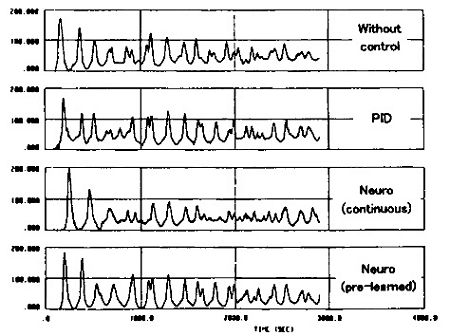
近年, 海洋油田開発は新たな石油資源を求めて大水深域や厳環境下の海域へと拡大する傾向にある。生産システムの高稼働率を確保するため, FPSOとシャトルタンカーとの相対運動を小さくし, ホーサ張力を抑え積出時の作業限界波高を引き上げる必要がある。本研究では外乱下においてFPSOの方位を保持するためのPID制御にニューラルネットワークを活用した制御を追加する新しいアルゴリズムを開発し, その適用性についてシミュレーション計算や水槽実験により確認を行った。
Fig.15 Comparison of loci, hawser tension time histories and maximum hawser tension
[75] 可変ゲインによる航路誘導制御に関する研究
福田人意, 大津皓平(東船大)
田崎哲夫(IHI)
岡崎忠胤(海技研)
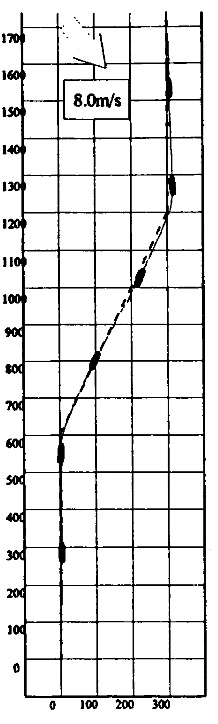
最近のコンピュータの発達によって, これまで不可能であった制御が可能となった。その1つがリアルタイムで最適解を求め, そのフィードバックゲインを用いて制御をかける方法である。シミュレーションと実船実験において, 直線の航路と変針を必要とする航路のトラッキング, 舵の効かない低速域ではBow thrusterによるトラッキングを行い, この方法が有効であることがわかった。右図に破線で示した航路に対し, トラッキングを行った実船実験の結果を示す。
[76] 有孔矩形板の座屈・最終強度推定法に関する研究
原田 実(NK), 藤久保昌彦(広大)
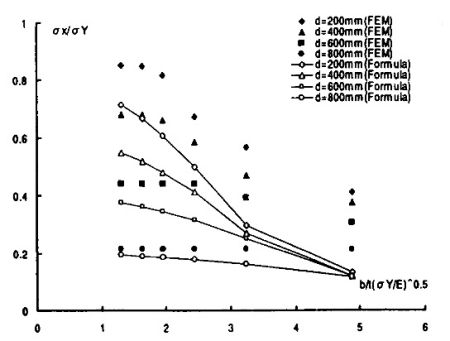
本研究では, 有孔矩形板に対してFEMによる固有値解析を広範囲に実施し, 得られた結果に基づき, 有孔矩形板の弾性座屈強度評価のための実用的な強度推定式を提案する。次に, 有孔矩形板に対する塑性修正法として, 開孔部の有効断面における降伏の影響を考慮した塑性修正式を提案する。この塑性修正式により求まる座屈強度をFEM弾塑性大たわみ解析で求まる最終強度と比較し, 提案算式の有効性を示す。さらに, 縦圧縮荷重の場合について, 有孔矩形板に対する最終強度推定式を提案する。
提案の塑性修正式による座屈強度とFEMによる最終強度の比較