3.3 船体関係システム
(1) 船体管理に関するPDCAサイクルの検討
現在のところ、船体状態が「航海に適した状態」ならびに「荒天に耐えうる状態」であるかの判断は個々の船長の知識・経験に委ねられている。しかし、ライフサイクルを通じて管理の責任をもつべき、船舶の所有者である船社、あるいは運航を委託されている管理会社によるものと考えるのが妥当であろう。
本研究では、耐航性に関わる判断について以下を原則としておくものとした。
船舶運航管理会社は、各々管理船がその航海において遭遇する気象・海象とそこでの船体動揺を予測し、船体動揺によって生じる種々の現象が船体構造ならびに貨物の保全状態に与える影響の程度を客観的な指標でもって測り、さらには、「安全」であるか「危険」であるかを判別するための基準値を当てはめ、これにより、各管理船の航海前、ならびに航海途上における当該航海計画の検証を行う。
せんたい動揺によって引き起こされ、船体構造あるいは主機関などの装置にダメージを与える可能性のある現象を、耐航性を阻害する要因(耐航性阻害要因)と呼ぶことにする。
現在のところ船長は、耐航性阻害要因の発生を主に五感に頼って検知しており、船長個人の知識と経験に基づいて推測するより他はない。
耐航性阻害要因が船体構造等に与える影響を客観的な指標でもって測り、「安全」であるか「危険」であるかを判別するための基準値を持つことによって、耐航性阻害要因の発生を未然に防ぎ、かつ回避するための判断に指標を与えようとするものである。判断に用いる客観的な数値基準を耐航性基準と呼ぶこととし、各耐航性阻害要因とその発生を検知するための対象(監視対象)、ならびに耐航性基準との関連を表3.6に整理した。
表3.6 耐航性阻害要因の監視対象と耐航性基準となる計測項目
| 安全で確実な貨物輸送の阻害 |
耐航性の観点からみた阻害要因 |
監視対象 |
直接的な計測項目 |
計測手段の現状(提案) |
代替手段の検討 |
耐航性基準となる計測項目 |
| 到着の遅延 |
・波浪/風浪による自然減速 |
減速量 |
対水速力、対地速力の比較 |
遭遇時のみ計測 |
相関→ |
風向・風速、
波向・波高 |
| ・(事故の発生/船内災害の発生):以下参照 |
| 貨物の破損/流出 |
・荒天による船体動揺 |
船首上下加速度
Roll
横加速度 |
各加速度 |
加速度計 |
代替不要 |
船首上下加速度
左右加速度 |
| ・スラミング |
スラミングの発生 |
音
振動 |
(マイク) |
相関→ |
船首上下加速度 |
| ・デッキウェットネス |
デッキウェットネスの発生 |
海水の打込み |
目視(カメラ)
船首波高計 |
代替不要 |
船首相対波高 |
| ・ラッシング不良 |
ラッシング状態 |
概観
ラッシング材張力 |
目視(カメラ)
手作業
(ストレンゲージ) |
相関→ |
船首上下加速度
Roll
左右加速度 |
| 事故の発生 |
・荒天時の過大な船体動揺による船体の破損(船体折損) |
縦曲げ応力
横曲げ応力
ねじり応力
喫水・トリムの変化 |
応力量、歪量
喫水 |
(応力計)
(喫水計) |
相関→ |
Pitch
Roll
船首上下加速度
左右加速度 |
| ・荒天時の過大な船体動揺による積付状態の変化 |
荷崩れ喫水・トリムの変化 |
概観
喫水 |
目視(カメラ)
(喫水計) |
相関→ |
Roll
左右加速度 |
| ・荒天時の過大な船体動揺による機器(主機)の故障/停止 |
機器(主機)への負荷:プロペラレーシング |
主機回転数 |
主機回転数
の計測 |
代替不要 |
主機回転数 |
| 船体余寿命低下 |
・荒天による過大応力とその蓄積 |
縦曲げ応力
横曲げ応力
ねじり応力 |
応力量、歪量 |
(応力計) |
相関→ |
Pitch
Roll
船首上下加速度
左右加速度 |
| 機器余寿命低下 |
・荒天による過大負荷とその蓄積 |
機器(主機)への負荷:プロペラレーシング |
主機回転数 |
主機回転数の計測 |
代替不要 |
主機回転数 |
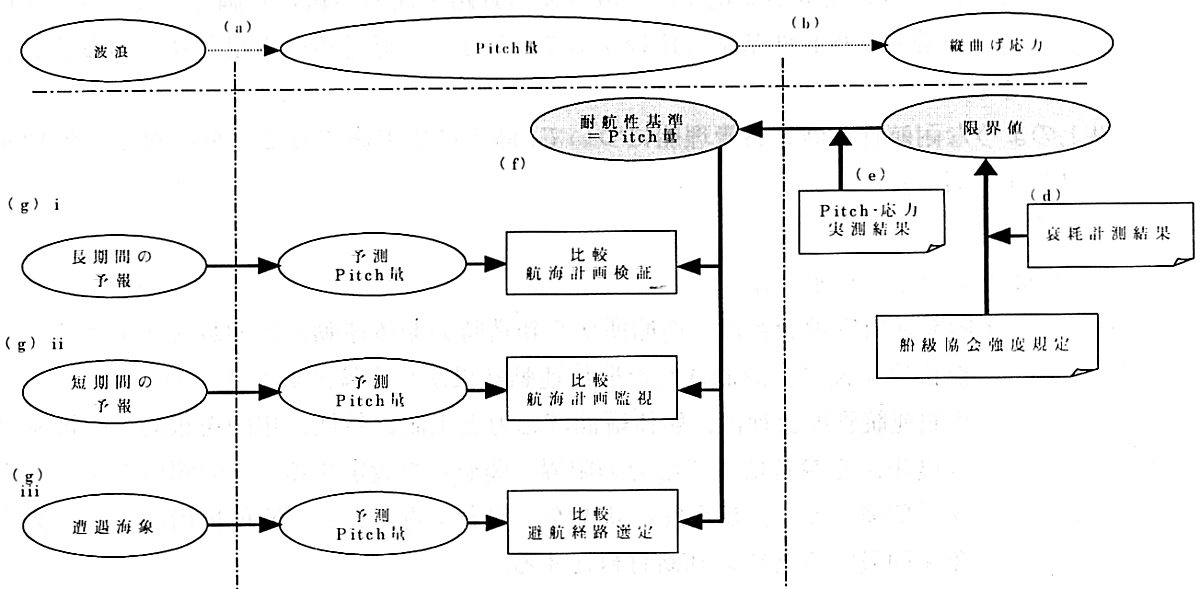
本研究では、ライフサイクルレベルでの船体健全性を考慮した、耐航性管理に関する運用スタイルを検討した。図3.7に耐航性基準の考え方を示す。
(拡大画面: 85 KB)
図3.7 耐航性判断の流れ
(a) 船体は遭遇する波浪により動揺する。この動揺量は各船の応答関数として与えられる。
(b) 動揺量の内、Pitch量は縦曲げ応力と相関関係がある。
(c) 縦曲げ応力には船級協会が定める強度基準が存在する。
(d) 船級協会の強度基準に相当する応力が発生するPitch量を特定することができるが、この強度基準は正に船体が折損する限界値を示すものであるため、実運用上では船体の健全性を加味して強度基準を修正する。ここでいう船体の健全性は、板厚計測によって得られた衰耗の程度を参考にして与える。
(e) また、Pitch量計測結果と歪センサーによる応力計測結果との比較を行い、Pitch-応力の相関関係を確認した結果を参照して強度基準を修正する。
(f) 修正された強度基準に相当するPicth量を耐航性基準と考える。
(g) 耐航性基準は以下の局面において利用される。
i. 航海計画策定時における利用
航海計画策定時おいては、長期的、広範囲にわたる波浪の予報値を取得し、航海計画に従った針路・速力で航行した際の波浪との遭遇状況を予測する。波浪との遭遇状況から船体動揺(Pitch量)を推定し、耐航性基準との比較を行い、当該航海計画の検証を行う。
ii. 航海中の荒天遭遇の事前回避における利用
航海中においては、航海計画策定時と同様に長期的・広範囲の波浪予報による先々の航海計画の検証・見直しを継続的に実施するとともに、短期的で、現航海計画ルート周辺海域の波浪予報による、船体動揺の予測と耐航性基準との比較を行い、荒天遭遇の事前回避に努める。
iii. 荒天回避における利用
荒天に遭遇している状況では波浪に対する避航操船の手段として、種々の針路・速力の組合せを想定することができる。組合せによって波浪に対する相対関係が異なり、船体動揺量が変化する。取りえる針路・速力の組合せ個々に発生するPitch量を計算し、耐航性基準と比較することにより、避けるべき組合せを知ることができる。
以上のような耐航性判断を各管理船について、陸上にて実施することを目的としたPDCAサイクルを検討した。
(a) Plan
<陸上:ライフサイクル>
[1] 船舶運航管理会社は、造船所から新造時の船体運動応答関数を入手する。処女航海完了後に、計測された船体運動結果から応答関数をチェックする。
[2] 船舶運航管理会社は、船体縦曲げ応力と上記の特性の相関を求め、船級協会の強度規定を参考にして応力の限界(閾値)を設定する。この閾値を超える状況を「危険:赤」、超えない状況を「安全:青」とし、船体折損の危険のある海象を回避するための判断材料とする。
[3] 船舶運航管理会社は、各船5年ごとに衰耗状態(断面係数)を保全システムから取得し、閾値を確認・修正する。
<陸上:一航海毎>
[1] 船舶運航管理会社は、入手可能な気象海象予報を入手し、耐航性管理システムを用いて各船の次航海計画について耐航性の評価を行い、全て「青」となる航路選定を行う。
[2] 航海終了後、実績データを解析し、気象海象予報の精度、船体動揺推定の精度、応力推定の精度の確認を行い、 「危険:赤」 「安全:青」判定の妥当性を確認する。
<陸上:モニタリング>
[1] 船舶運航管理会社は、各船が遭遇している気象・海象ならびに船体運動データを取得する。
[2] 入手可能な気象海象予報を継続的に入手し、変化傾向を把握する。
[3] [1]にて入手した各船の現況をもとに[2]の予報値を検証する。
[4] 検証した気象海象予報を用いて、各船の以後の航海計画について耐航性の評価を行い、「危険:赤」となると判断された場合は、回避する経路を選定して、これを該当する船舶に指示する。
<本船>
[1] 各船での出航前の関連事項は、基本的には従前通りとする。
[2] 各船での航海中、荒天遭遇時のワッチも従前通りとする。
[3] 各船では上甲板の歪計測は2点程度実施する。
[4] 各船では波向き(出会い角)を観測する。
[5] 監視データは基本的には全て陸上に送る。
[6] 本船上に残すデータは運航に必要なもののみとする。
[7] 原則として、データ送信は定時的に行うものとするが、荒天遭遇時には送信ピッチを短くする。
[8] 各船(船長)は、陸上からの荒天避航経路、もしくは耐航性監視システムの「赤・青」の表示に従って荒天を回避する。
[9] 各船(船長)は、陸上からの指示、ならびに耐航性監視システムによる表示について、現場の状況との齟齬等のコメントを記録する。
(b) Do
陸上、本船とも、PLANに従った管理・運航を実施する。
(c) Check (陸上)
[1] 気象海象の予報と実際との違いを比較し、誤差の有無を確認する。
[2] 船体動揺の予測と実際との違いを比較し、誤差の有無を確認する。
[3] 応力の予測と実際との違いを比較し、誤差の有無を確認する。
[4] 応力の実績データから設定した閾値を超える状況の有無を確認する。
[5] 閾値を超える状況があった場合は、気象海象の予測精度、船体動揺推定の精度、応力推定の精度のいずれに問題があったのか、あるいはその他の要因があったのか、問題点を特定する。
[6] 船長のコメントも考慮し、荒天回避指示の適否について定期的に調査する。
(d) Act (陸上)
[1] 気象海象の予報の誤差に傾向があれば、以後の予報値についての補正量を特定し、これを用いる。
[2] 応答関数が実際と合わない場合には、造船所、研究機関に相談し、推定結果に対する補正量を特定し、これを用いる。
[3] 得られた実績(実動揺と実応力)をサンプルとして追加し、応力推定式を再計算する。
[4] 気象海象予報の補正量、あるいは応答関数の補正量の特定が困難である場合、ならびに閾値を超える状況の要因として問題点の特定が困難である場合には、閾値の安全率を修正する。
[5] 現閾値と異なる基準の採用についても視野に入れて、データ取得方法、モニタリング方法など、耐航性管理に関わる運用スタイル全般について見直しを行う。
(2)具体的な耐航性基準の設定
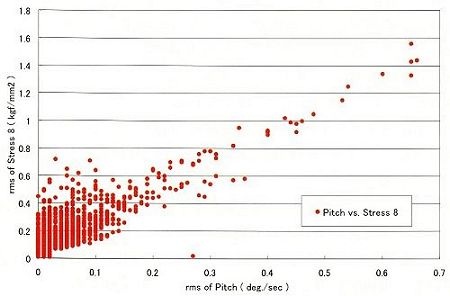
図3.8に示すように縦揺れ量と縦曲げ応力には相関が認められる。
図3.8 コンテナ船の船体中央甲板の波浪縦曲げ応力と
ピッチの短期不規則波中(20分間)の標準偏差の関係
船級協会として日本海事協会規則を採用し、あるコンテナ船を例として、波浪縦曲げモーメントが超過確率Q=10-8に対応する値MVQ=10-8とピッチ運動θQ=10-8の値を求め限界のピッチ角を求めた。この値が当該コンテナ船の耐航性基準値となる。
表3.7 日本船級協会規則でのピッチ角最大値
| ピッチ角(deg) |
曲げモーメント(ton × m) |
| 5.4 |
hog 423,200 sag 508,500 |
(3) 船体関係のシステム試作
表3.8に船体関係システムの機能分担を示す。
表3.8 船体関係システムの機能分担
| |
耐航性監視システム |
耐航性管理システム |
| 利用対象レベル |
Operational Level
-船橋当直者
|
Management Level
-船長
-フリートマネージャ |
| 役割(目的) |
・ 現在遭遇中の気海象下にて発生している耐航性阻害要因の監視
・ 計画航路上において発生が予想される耐航性阻害要因の監視
・ PDCA上必要とされるデータの収集 |
・ 現在発生している耐航性阻害要因を回避するの為の操船支援(シミュレーション)
・ 耐航性阻害要因の事前予測に基づく航海計画の作成支援(シミュレーション) |
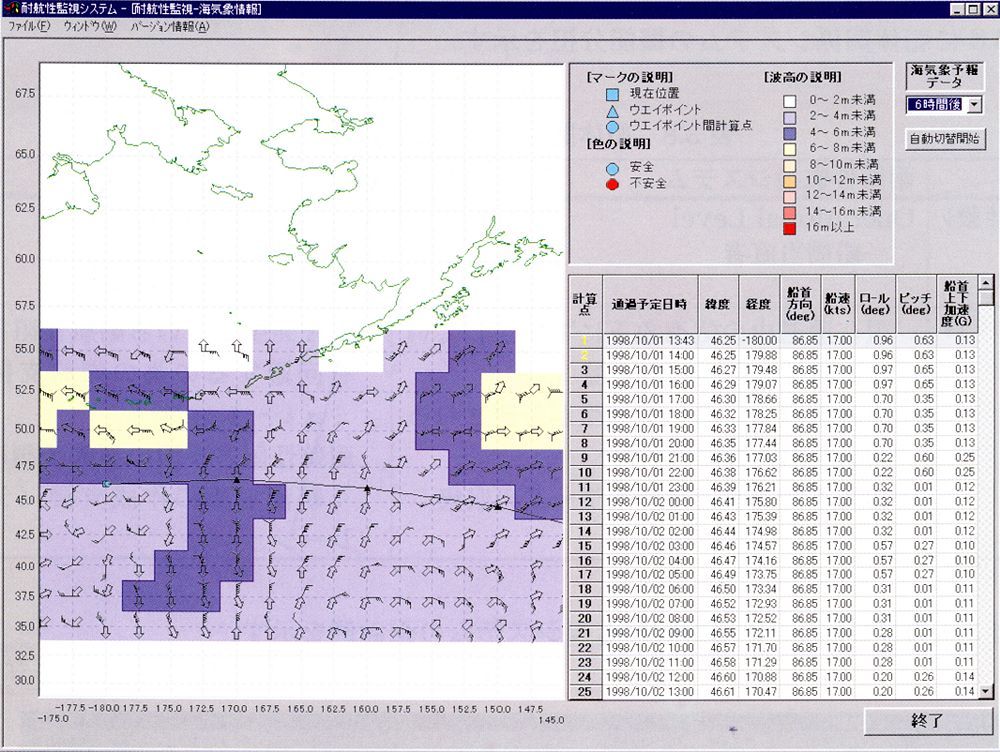
図3.9および図3.10に耐航性監視システムの画面例を示す。
(拡大画面: 156 KB)
図3.9 耐航性監視システムによる航路途上での耐航性評価
(拡大画面: 176 KB)
図3.10 耐航性監視システムによる気象海象予報の確認
(4) 評価試験の実施
試験実施の概要については、全体システムにて述べた。
その他、試験にて指摘された事項を以下に示す。
[1] 天気図の重畳
航海途上での避航経路を検討には、風速・風速、波高・波向の推移だけではなく、天気図の推移も重要な判断材料になる。今回の表示に天気図を重畳できるようにして欲しい。
[2] ETAの計算機能
減速量を考慮したETAの計算は有用である。
避航経路の検討時には、燃料消費の違いも考慮されるべきである。
[3] 中期的・長期的な耐航性判断との連携
耐航性監視システムにて当座の荒天を避航するための操船領域の表示するだけではなく、その時点で中期的・長期的な将来についても併せて耐航性評価を行う。
戦略的な荒天避航操船の決定は、大局的な判断が行える陸上側で実施する。