3.2 航海関係システム
(1) 海上で利用可能な情報に関する調査
航海関係システムは、航行環境の監視について数値的な安全基準を与えるものとした。そこで、海上で利用可能な情報を調査し、これらから、安全基準の指標となるデータの種類を検討するものとした。航海関係システムでは、各種監視作業の内状況変化が他律的で、かつワッチレベルの切替えに大きく関連する交通環境監視に着目した。交通環境監視の有用な情報源として期待できるAISの現況について調査した。
表3.3にAIS調査結果の概要を示す。
表3.3(1) AISからの他船情報
| 情報項目 |
種類 |
内容 |
| 静的情報 |
コールサイン |
VHF通信コールサイン 6bit ASCII6文字 |
| 船舶識別番号 |
MMIS(海上移動業務識別)番号、IMO番号 |
| 船名 |
英字 6bit ASCII20文字 |
| 船舶長 |
船舶長 |
| 船種、積載物 |
所定のコードにより指定 |
| GPSアンテナ位置 |
船首、船尾、右舷、左舷それぞれからの距離 |
| 動的情報 |
航行状態 |
投錨、航行中、制限運航状態等 |
| 船位 |
経度・緯度 |
| 対地速度 |
ノット |
| 対地針路 |
度 |
| 船首方位 |
度 |
| 位置精度 |
誤差10m以上or以下 |
| 回頭率 |
度/分 |
航海関係
情報 |
喫水 |
|
| 危険貨物(種類) |
|
| 目的地と到着予定時刻 |
英字 6bit ASCII20文字 |
| 航海計画(通過地点) |
|
表3.3(2) 情報交信間隔(自動モード)
| 情報種類 |
船の状態と更新間隔 |
| 静的情報 |
6分間隔または要請の都度 |
| 動的情報 |
停泊もしくは錨泊中で、3ノット以上で動かない 3分 |
| 停泊もしくは錨泊中で、3ノット以上で動く 10秒 |
| 0から14ノットまでで航行する船舶 10秒 |
| 0から14ノットまでで航行する変針中の船舶 3・1/3秒 |
| 14から23ノットまでで航行する船舶 6秒 |
| 14から23ノットまでで航行する変針中の船舶 2秒 |
| 23ノット以上で航行する船舶 2秒 |
| 航海関係情報 |
6分間隔または要請の都度 |
(2) 航海関係におけるPDCAサイクルの検討
表3.4に航海関係におけるPDCAの着眼点を示す。
表3.4 航海関係における管理対象
フリートとしての
管理の目的 |
具体的な目標値 |
「是」・「非」の判定 |
| 適正な作業量の維持 |
適正作業量と人の設定
(指標・基準は検討課題) |
各自作業時間合計
(トータル量) |
不履行作業の有無
(ピーク) |
| 安全航行の保障 |
航行安全帯の設定
(可航水域の狭隘さに応じて) |
航行安全帯突出回数の減少傾向の維持 |
安全航過距離の設定
(ワッチレベル1で2マイル、ワッチレベル2で1マイル) |
他船とのニアミス回数の減少傾向の維持 |
表3.4に示した管理対象を運用するPDCAサイクル案を検討した。
(a) PLAN
(i) ワッチレベルと作業分担
各ワッチレベルでのワッチ体制規定(担当者と使用機器の組み合わせ)
担当者各自の役割規定
使用機器の役割規定
担当者間のチームワーク規定(特にワッチ切替え時のチームワーク)
(イ) ワッチレベル切替え計画(適正作業量に基づく)
(口) 航海計画に基づく各WPにおけるワッチレベル計画:統計資料による
・自動機器導入による作業軽減策
○航行環境把握作業 ・地形環境把握 ECDISとGPS
・自然環境把握 気象海象情報 「船体関係」
・交通環境把握 ARPAやAIS
○自船状態把握作業 「機関関係」、 「船装関係」
○航海計画の実行 トラックパイロット
○危険判断作業 安全航過距離確保困難な範囲表示
(ハ) 輻輳状況によるワッチレベル切替え計画:輻輳状況把握による
(ニ) (地形環境状況によるワッチレベル切替え計画)
(ホ) (自然環境状況によるワッチレベル切替え計画)
(ii) 船内における分担再確認とチームワーク訓練
(iii) ワッチ作業の記録内容と記録方法
(b) DO
Planに基づいたワッチの実施
(c) CHECK
計画通りにワッチレベルが切替えられたか判定
遭遇環境の変動に応じて適切にワッチレベルが切り上げられたか判定
オーバーワーク発生の有無を不履行作業の有無により有無
安全航行が実行できたかをニアミス事例の有無により判定
遭遇環境の変動に応じて適切にワッチレベルが切り下げられたか判定
原因チェックは作業分担・機器・切替え基準について行う。
(d) ACT
| 作業分担の見直し |
片寄りの改善 |
| 機器の改善 |
機能の向上、機能ロジックの換装 |
| 切替え基準の改善 |
切替え時期の手直し |
| PLAN自体の見直し |
|
表3.5に航海関係における船上システムの機能分担を示す。
表3.5 航海関係における船上システムの機能分担
分類
(利用者) |
役割 |
システム名 |
機能の概要 |
| 管理レベル |
パッセージプランの管理 |
航海計画管理システム |
パッセージプランの受領、各監視システムへの配信 |
| 航海実績の管理 |
航海実績管理システム |
監視結果やワッチレベル切替え状況、船長コメント等航海実績の記録・集計、実績の陸上への連絡 |
| 監視レベル |
位置・針路・速力の監視 |
航行保全システム-1 |
座礁危険域の表示、航行安全帯突出の監視、 |
| 交通環境の監視 |
航行保全システム-2 |
衝突危険領域の計算・表示、輻輳状況の判断 |
| 自然環境の監視 |
風速、波高の監視 |
| ワッチレベル切替え判断 |
各監視事項の現状表示、基準値超過により切替え判断 |
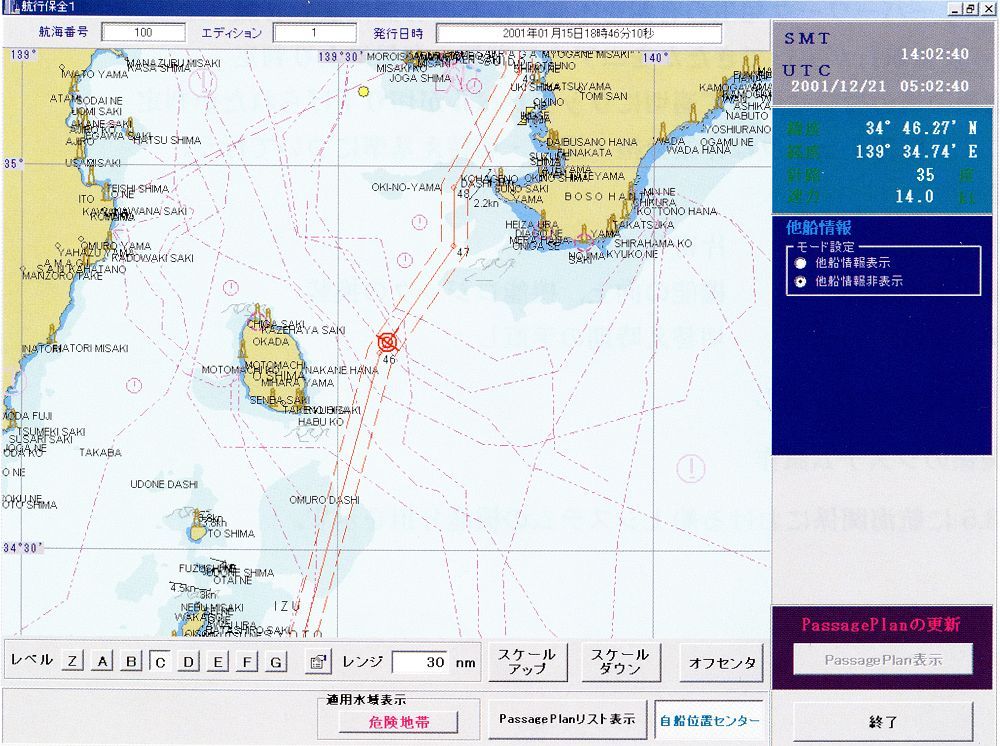
図3.5に航行保全システム−1の画面例を示す。図3.6に航行保全システム−2の画面例を示す。
(拡大画面: 159 KB)
図3.5 航行保全システム−1 (位置・針路・速力保全監視) の画面例
(拡大画面: 156 KB)
図3.6 航行保全システム−2 (交通環境監視) の画面例
(4) 評価試験の実施
試験実施の概要については、全体システムにて述べた。
その他、試験にて指摘された事項を以下に示す。
[1] その他補助情報の設定機能の追加
NoGoArea、Wheel Over Point、Parallel Index、避険線、ヘッドマークの航行補助情報の作成機能を追加する。
[2] その他必要情報の管理機能と連携
各管理船の主要目や運動性能を管理するサーバ
営業部門と関連し積み付け状態を管理するサーバ
機関関係システムと連携し燃料油等の搭載状態を管理するサーバ
Tidal Windowのように通航時の潮位を確認するためのサーバが必要で、これら各種のデータサーバから所要のデータを検索・入手する機能が求められる。
[3] 航行保全システムの役割分担
航行保全システム−1と航行保全システム−2とでワッチレベルの違いに応じて、機能の分担が異なるべきである。
機器に監視機能、表示機能、操作機能を固定するのではなく、監視機能と表示・操作機能とを別階層としてそれぞれ独立させ、ワッチレベルに応じて画面・操作、対、監視機能の組合せが選択できるようにする。
[4] 船長コメントの入力促進機能
航海実績管理システムの方から船長に対してコメントの入力を促進する。
音声入力について考慮する。