|
(3)自動トラッキングのアルゴリズム
自動トラッキングの処理過程は、ある船舶位置の連なりが同一の船舶であるかどうかの初期識別を行う『前半部分』と、連続的に航跡の取得を行っていく『後半部分』からなっている。
(i)船舶の初期識別(自動トラッキングの前半部分)
ここでは、先のマスキング・船舶映像抽出作業により取得された各時間断面の個々の船舶位置を、同一船舶のものとして初期識別するアルゴリズムについて述べる。
(1)連続した3個の時間断面における船舶位置の重畳表示
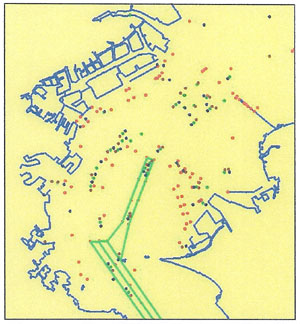
図1.2-16は、先のマスキング・船舶映像抽出作業によって得られた連続した3個の時間断面における各船舶の位置を重畳表示したものである。図中では、最初の時刻の船舶位置を(青色)、1分後の船舶位置を(緑色)、2分後の船舶位置を(赤色)で示している。これらの連続した3個の船舶の位置情報(青色→緑色→赤色)により、観測者はこの海域内における船舶の航行状態(針路・速力)を把握する事ができる。
この連続した3個の位置による船舶の初期識別を人間が行う場合、船舶位置の連なりの状態から同一船舶であると感覚的に判断しているわけであるが、自動トラッキングでは、この初期識別作業を自動的に行う必要がある。そこで次に、連続した3個の船舶位置を同一船舶のものと自動的に識別する方法について述べる。
図1.2-16 連続した3個の時間断面における船舶位置の重畳表示
(2)連続した3個の船舶位置に基づく船舶の識別
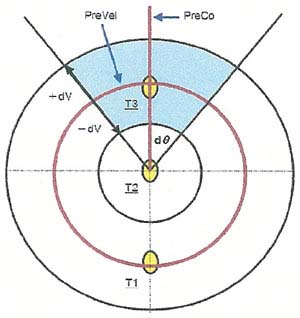
図1.2-17は、連続した3個の船舶位置に基づく船舶の識別判断方法を示したものである。図中には、時刻T1、T2、T3における連続した3個(1分間隔)の船舶位置を示している。自動トラッキングの前半部分では、これらの船舶位置が同一船舶のものと判断する必要がある。
具体的な処理方法としては、T1からT2までの初期1分間における針路と速度に基づき、次のT3における船舶位置の出現エリアを予測し、実際のT3における船舶位置がその予測エリア内に存在するか否かによって同一船舶であるかどうかの判断を行っている。
予測エリア(図1.2-17の水色の部分)の設定は、T1からT2までの初期針路と初期速度を保持したまま船舶が航行したと仮定し、T3における出現予測位置を基準として、予測速度の幅dVと予測針路の幅dθを考慮して決定される。
自動トラッキングでは、予測速度の幅dVは予測速度の60%、予測針路の幅dθは30度として、予測エリア内に時刻T3の船舶位置があれば、T1、T2、T3における3個の船舶位置は同一船舶のものと判定した。
図1.2-17 連続した3個の船舶位置に基づく船舶の識別判断
(ii)4個目以後の船舶位置の自動トラッキング(自動トラッキングの後半部分)
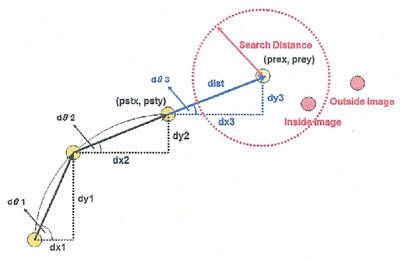
最初の3個の船舶位置が同一船舶のものと確定した場合、次に4個目以後の船舶位置を次々に探索し、船舶の航跡を求めていく。このアルゴリズムは、次のようなものである。(図1.2-18参照)
まず、3個目の船舶位置(Pstx,psty)から予測針路と予測速度に基づき、4個目の予測船舶位置(Plex,prey)を求める。予測針路は2個目と位置から3個目の位置までの針路とし、予測速度は最初の位置から2個目の位置までの速度と2個目の位置から3個目の位置までの速度の平均値とする。
図1.2-18 4個目以後の船舶位置の自動トラッキング
次に、4個目の予測船舶位置から半径300mの円内に存在する最も近い船舶の位置を実際の4個目の船舶位置とする。(もし半径300mの円内に船舶が存在しなければ、その船舶はロスト(映像消失)したとみなされる。)
次に、2個目、3個目、4個目の船舶位置から同様な方法で5個目の船舶位置を求める。この手順を繰り返し、次々に1分ごとの船舶位置を求めていく。
以上の方法により、船舶の航跡を自動的に求めることが出来る。なお、ある時刻に船舶がロストしても、その1分後の船舶位置を予測し、その予測位置から半径900mの円内にある最も近い船舶を同一船舶とみなして、トラッキングを続けるようにしている。
(4)自動トラッキングによる航跡取得の一例
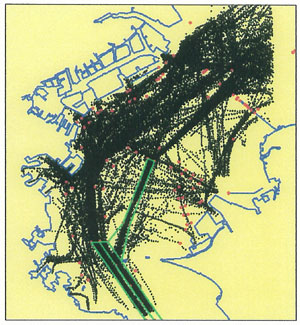
東京湾レーダネットワークシステムで記録された2005年8月17日00時00分から8月17日23時59分までの1分ごとの24時間分のレーダ画像を用いて、船舶の自動トラッキングを行った。
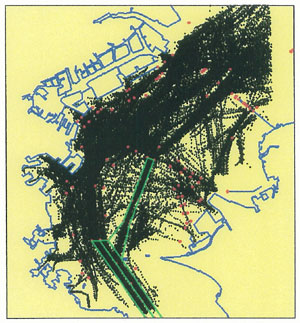
図1.2-19は、自動トラッキングによる全処理船舶(人間により航跡が正しいかどうかの確認作業を行っていないもの)の航跡であり、図1.2-20はそのうちのトラッキング成功船舶(人間により航跡が正しいと確認されたもの)の航跡を示している。
従来の手動(人間がマウスにより航跡を取得する方法)による航跡取得作業では、一人で24時間分のデータを処理するのに約1ヶ月の時間を要していた。しかし、この自動トラッキングを用いると、取得された全処理船舶(1277隻分)のうちから成功船舶(707隻分)を確認するのに、約1日しか要しなかった。
図1.2-19 自動トラッキングによる全処理船舶の航跡(1277隻)
| 図1.2-20 |
自動トラッキングによるトラッキング成功船舶の航跡(707隻) |
このように、開発した自動トラッキングシステムは、非常に多くの船舶航跡を迅速に取得できることが確認された。今後、より正確に船舶航跡を取得できるように、トラッキングアルゴリズムにおける各パラメータの最適化を図り、またトラッキング中の比較的長い時間の船舶映像ロストにも対応できるよう、プログラムを改良する予定である。
|