|
ターゲットを用いた地形歪み除去精度として以下にまとめた。
(1)垂直方向の目標値については、入射補角40度以内において、ターゲット2上の高さ20cmの箱を捉えており、地形歪み除去画像からも水平位置の移動量が認められたため、水深の約2%以上の地形変化による歪みは十分に除去が可能と考えられる。
(2)水平方向の目標値については、音響画像データの照射覆域内において目標値を十分に達成している。その精度は、例えば送受波器直下近傍については、LINE-2のターゲット1上の箱を識別できているように、水深データの照射覆域とほぼ等しい範囲で除去が可能と思われる。また入射補角が40度以内においては、LINE-3のターゲット2に見られるように、ターゲットの設置方向により測線によっては、同じく水深データの照射覆域とほぼ等しい範囲で除去が可能である。
(3)LINE-2のターゲット1上の2列の箱を復元できたことにより、少なくとも入射補角が20度以上40度以内であれば、上記の(1)及び(2)の目標値を達成可能である。入射補角が0度(直下)から20度未満については、音響画像データの照射覆域が広く、ターゲット上の箱を明瞭に捉えにくい。
(4)地形歪みは、距離方向(航跡に直交する方向)に音響画像データが移動する現象であるため、ターゲットの長い辺が航跡と直交するようにターゲットを設置した場合は、ターゲットを捉えにくい。逆に長い辺が航跡に平行となるように、ターゲットを設置した場合は、送受波器直下近傍または送受波器から離れた位置でも、捉えやすいことから、直交または斜交するような複数測線による測量計画を立てる必要がある。
これらの結果より、本研究の除去手法について有効性が確認された。
(4)目標値を達成するためのSeaBat8101システム
上述の目標値を達成するための現有のSeaBat8101システムの問題点とその対処法についてまとめた。
(1)HYPACK収録データの時間遅れ
現有のSeaBat8101システムの問題点については、平成14年度の研究においても、HYPACKソフトウェアを用いたデータ収録において、時間遅れによる収録データの整合性の問題点について報告している。時間遅れは、水深、音響画像データ、姿勢データ、測位データの時間の整合性が得られず、結果として、地形図あるいは画像から正確な位置を特定することができない。現在までに、以下に示す3つの時間遅れの原因が報告されている。
(a)HYPACKソフトウェアを搭載するパソコンの時間遅れ
SeaBat8101のソナープロセッサーから送られてくる各データ(水深、海底面画像、姿勢、測位)は、HYPACKソフトウェアを搭載するパソコンに収録される。各データには、パソコンが受信した時のパソコンの時間がイベントされるため、パソコンの時間が遅れた場合は、GPSとの時間のずれが生じる。
第六管区海上保安本部所有の「くるしま」に搭載されているSeaBat8101システムには、他に管区の測量船には搭載されていないインテグレーテッド慣性航法装置POS/MVが接続されている。このシステムに搭載されているHYPACK収録ソフトウェアは、パソコンの時間をPOS/MVで得られたGPS時間に自動的に同期させる機能を有するため、メーカーによればパソコン時間の遅れは無いとのことである。
(b)HYPACKソフトウェアを搭載するパソコンの過負荷による時間遅れ
HYPACKがリアルタイムで収録データのグラフィック表示を行うため、パソコンに過負荷がかかり、その結果SeaBat8101ソナープロセッサーからHYPACKに入力される各データ(水深、海底面画像、姿勢、測位)の収録データに時間遅れが生じる。
(c)Latency
Latencyとは、測定されたデータが実際に外部へ出力されるまでの遅延時間である。GPS受信機、方位センサー、動揺センサーなど種類によってそれぞれ異なった値となり、同じ種類のセンサーでも正確な値はセンサー毎に異なる。たとえばGPS受信機の測位情報送出時刻の遅れ時間は、機種及び計測のサンプリング間隔によって異なり、最大で1秒前後となる。
現在までの解析結果より、上記の時間遅れの中で2の影響が最も大きいことが判明している。平成14年度に実施された名古屋港実験においては、これらの時間遅れに対応するため、図37に示すHYPACKとデータ収録装置による同時収録を実施した。(4)地形歪み除去画像の評価で示した垂直方向及び水平方向の除去精度を維持するためには、図37の収録環境が必要不可欠である。
データ収録装置は、GPS Latencyが約1ms以下と極めて小さく、海底地震計の時計合わせでも広く使われているTRUETIME社製のModel 560-59007/08受信機を使用し、この時間を用いて、データ収録装置のパソコンの時間合わせを1分毎に実施する。
SeaBat8125は、ビーム間隔がSeaBat8101に比べてサンプル数が多く、隣り合うビーム間隔が狭いため、収録データに含まれる時間遅れの影響が地形図に顕著に現われる傾向にある。SeaBat8125の収録システムに、この受信機を使用し、水深15mの海域でデータ収録装置を用いた収録を行ったところ、現在までの解析結果では収録データに時間遅れの影響は見られていない。
HYPACK搭載パソコンには、時間合わせのソフトウェアを測量中常時作動させることにより、LANで接続されたデータ収録装置のパソコンの時間に同期するようにしている。これは約1分毎に実施される。
これらの対処により、データ収録装置及びHYPACKのパソコンの時間遅れは、最大1msとなる。しかしながらWindowsOSの時計は、16ms以下の精度を保持することはできないことが現在までのテストで判明しており、今後も調査が必要である。ここで仮に20msの時間遅れがあったとしても、測量船が6ノットで航走した場合、約1.5cmの位置誤差がある。これは本研究の目標値以内であり、他の機器との整合性(センタービームの照射覆域、動揺センサー、方位センサー)から考慮しても、大きな問題とはならない。
時間遅れの中で最も影響が大きいHYPACKのグラフィック表示については、別のデータ収録装置による同時収録を行うことにより対処した。データ収録装置はHYPACKのようなグラフィック表示をせず、収録のみを行うため、過負荷による時間遅れが生じにくい。平成14年度の研究成果では、HYPACK収録よりも、データ収録装置の音響画像データの方が、斜距離補正時において、適切な補正ができることを報告している。
後処理で重要となるLatencyについては、測量海域で実施されるパッチテストで、Roll、Pitch、Yawのオフセットの値をHYPACKを用いて計測すると同時に、GPS Latencyについても計測する必要がある。HYPACKソフトウェアを用いたデータ収録では、Roll、Pitch、Yawのオフセットの値及びGPS Latencyを設定できるため、リアルタイムでの補正も可能である。
図37. 名古屋港実験収録システムの構成
一方、近年の測位では、仮想基準点(Virtual Reference Station:VRS)によるReal Time Kinematics GPS測位(以下VRS-RTK)が一般に可能となっている。名古屋港実験においても、測位地点近傍に仮想の基準点を設置し、その仮想点でのK-GPS誤差補正値を移動点に携帯電話で伝送する方式を採用した。VRS-RTKはK-GPSと同様に、衛星の数及び配置条件が良ければ、原理的には同等の精度が得られる。また従来の陸上固定点を基準とした後処理方式のK-GPSよりも簡便であることも大きな特徴である。
VRS-RTKの欠点は測量期間中、携帯電話で常時K-GPS誤差補正値を受信する必要があり、通信状況が悪いと不通になる恐れがあることである。また仮想基準点が国土地理院の電子基準点内にある必要があるため、測量範囲が限定される他、範囲を超えての測量では欠損となる。
名古屋港実験では、衛星の配置状態が極端に悪く、K-GPSにおいても、その測位精度を保つことができなかった。K-GPS及びVRS-RTK測位では、測量前に衛星の配置状況をあらかじめ調べ、最適な時間帯を選定することが極めて重要である。またVRS-RTKでは、データの遮断などの可能性があるため、携帯電話の設置場所や外部アンテナを設置するなどの対処も考慮しなければならない。
(2)音響画像データの収録
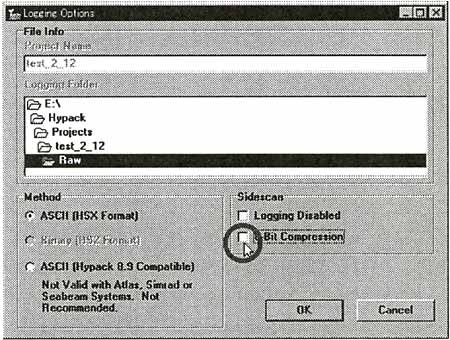
今までの通常の測量では、ハードディスクの容量の制限から、16ビットの音響画像データを8ビットに小さくして(下位ビットを捨てている)収録を実施している。底質分類では、収録される音響画像データから、海底面における後方散乱強度を算出する必要があるため、名古屋港実験では、図38に示すHYPACKの設定により、16ビット全てのデータを収録できるよう設定を変更してデータを収録した。
図38. HYPACKソフトウェアによる音響画像データ収録の設定
(3)SeaBat8101ソナープロセッサーからの音響画像データの欠損
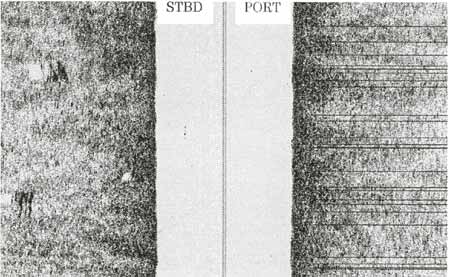
平成14年度研究において、HYPACKとデータ収録装置を用いた同時収録を実施した結果、データ収録装置で収録した音響画像データに図39のPORT側に見られるような不良データが含まれていることを報告した。この不良データは、HYPACK収録の音響画像データには含まれていないものである。その後の調査で、この不良データはSeaBat8101ソナープロセッサーから出力されたものであり、HYPACK収録では自動的に除去されていることが判明した。
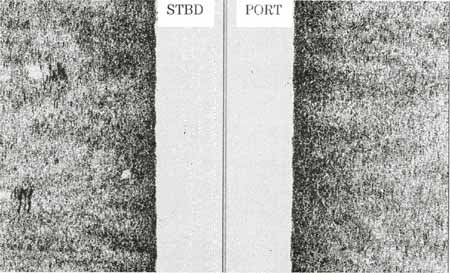
図39. データ収録装置で得られた音響画像データの斜距離画像
(a)PORT側に見られる不良データ(左右の黒線)
(b)(a)から不良データを除去したもの
ソナープロセッサーから送られてくる音響画像データは、1ピング毎に、添付資料1のデータフォーマットに示すような複数のパケットに分割されてデータ収録装置に送られている。本年度の調査により、ソナープロセッサーがデータを送信する際に、パケットの欠落が発生した場合、このような不良データとなることが判明した。複数のパケットのうち、どのパケットが欠落するかは、ピング毎に異なる。
そこで、データ収録装置で収録されたデータの中で、このようなパケットの欠落がある場合は、対象ピングを除去する処理を実施した。具体的には、各ピングに含まれる音響画像データ数の情報から、そのピングのパケット数を計算し、次のピングのデータまでにパケット数が満たない場合は、対象ピングを除去する。パケット数は、測量時に設定するレンジ長に比例して増加する。名古屋港実験ではレンジ長を25mに設定し、音響画像データのサンプル数が左右で合計1,000個となり、パケット数が2個であった。1パケットで700個の音響画像データを含むため、パケット数が2個に満たない場合は、対象ピングを除去する。
また名古屋港実験のHYPACK収録のデータには、この他に「ピングNOが異なるのに、収録時間が同じ」あるいは、「ピングNOが同一で収録時間が異なるj、といった問題が見られた。本年度は瀬戸内海伊予灘においてデータ収集を実施しており、名古屋港実験で生じた問題が無いか調査したところ、このような症状が見られなかった。名古屋港実験と伊予灘実験のデータ収録環境の違いは以下である。
(a)収録レンジの違い
名古屋港実験の25mに対し、伊予灘実験は150mであったため、収録間隔に時間的余裕がある。
(b)パソコンの速さの違い
両者のパソコンのクロックスピードは1GHz以上差があり、最新のSeaBat8101システムを装備する第六管区海上保安本部所有の「くるしま」のHYPACK搭載パソコンの方が速い。
(c)SeaBat8101システムの違い
伊予灘実験で使用したシステムでは、水深及び音響画像データ共に、LANで接続されているのに対して、名古屋港実験で使用したシステムは、水深のみがシリアル接続となっていることから、大容量の音響画像データは、時間遅れが生じやすい。
このような収録レンジの設定あるいはシステムの違いが、名古屋港実験で生じた問題と関係するかどうかについては、今後も調査を重ねる必要がある。
本研究では、現有のSeaBat8101の問題点を解消するべく、新規にデータ収録装置を用いてデータの収録を実施した。その結果、SeaBat8101ソナープロセッサーからの音響画像データに、不良データが含まれているといった新たな問題点も見出した。これは本研究の大きな成果の一つである。このような不良データが水深に応じて(発信間隔に依存して)、どれ位頻繁に発生しているかは、今後の調査の課題である。
|