|
(2)期待される成果
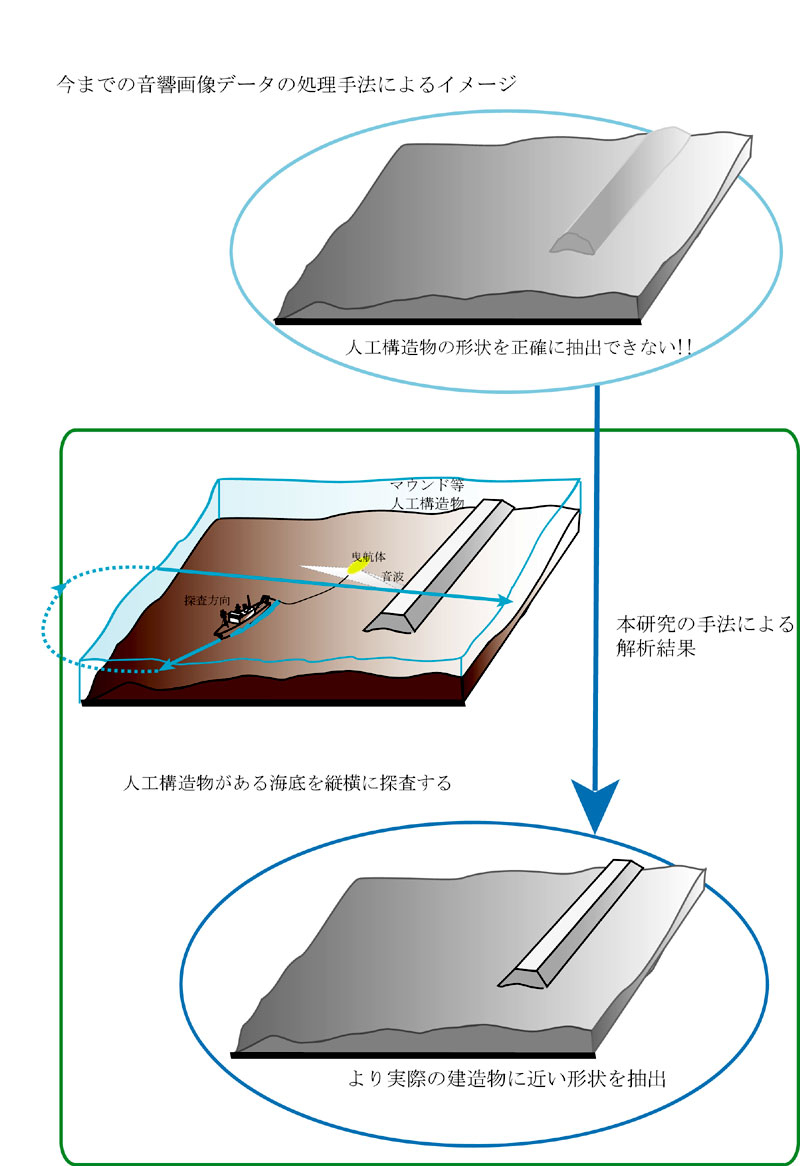
海底面画像データは、水深データでは表すことができない海底面の微細な地形や凹凸の変化、底質の違いを音響画像として表現することができる。本研究により、海底面画像データに含まれている歪みを取り除き、リニアメントの方向性、海底微細変動地形や海底のマウンドのより正確な位置及び形状把握が可能となり、詳細な地質学的情報を得ることができることから、水深図と同様に、船舶の安全な航行及び海難防止のための重要な基礎資料となる。
| (拡大画面:110KB) |
|
図5. 本研究の期待される成果
2.2 本研究の目標値
目標値の算出には、SeaBat8101の測深分解能(1.25cm)に、TSS社製動揺センサーDMS2-05またはDMS-10(以下、DMS)、インテグレーテッド慣性航法装置POS/MV(以下、POS/MV)の精度、KGPSあるいはDGPSによる測位誤差、さらにクロスファンビーム方式における各ビーム角を考慮する必要がある。
(1)SeaBat8101の仕様
SeaBat8101は、ソナーヘッドから発信される音響ビーム(周波数240kHz)が、送波ビームと受波ビームのクロスした部分の音響ビームで海底を測深するシステムである。1.5°×1.5°の音響ビームを用いて、150度のスワス幅で101点の測深が可能である。
水深は送波ビームを発信した時間から、海底で反射または後方散乱して受信されるまでの時間差を計測する。一方、海底面画像データは送波ビームを発信したときからの時間でサンプリングされている。表1にSeaBat8101の仕様を示す。
表1. SeaBat8101の仕様
| 周波数 |
240kHz |
| 水平方向のビーム指向性 |
170°(Transmit)
1.5°(Receive) |
| 垂直方向のビーム指向性 |
1.5°(Transmit)
15°(Receive) |
| ビーム数 |
101 |
| レンジ分解能 |
1.25cm |
| パルス幅 |
21[us]〜225[us]の範囲において、4[us]ステップ毎に可変。
75[us]typical |
| カバー範囲 |
150° |
| 発信間隔 |
レンジ(斜距離「m」) |
時間[s] |
Pings/s |
| 35 |
0.0467 |
21.429 |
| 50 |
0.0667 |
15.000 |
| 75 |
0.1000 |
10.000 |
| 100 |
0.1333 |
7.5 |
| 125 |
0.1667 |
6.000 |
| 150 |
0.2000 |
5.000 |
| 175 |
0.2333 |
4.286 |
| 200 |
0.2667 |
3.750 |
| 250 |
0.3333 |
3.000 |
| 300 |
0.4000 |
2.500 |
| 350 |
0.4667 |
2.143 |
| 400 |
0.5333 |
1.875 |
| 実用測深深度 |
300m |
|
(2)動揺センサーの仕様
表2にDMS及びPOS/MVの仕様を示す。
表2. DMSとPOS/MVのロール、ピッチ、ヒーブデータの精度
| 動揺センサー |
ロール及びピッチ精度 |
ヒーブ精度 |
| DMS |
0.05度@±30度 |
ヒーブ振幅の5%または5cmのいずれか大きい方 |
| POS/MV |
0.02度 |
ヒーブ振幅の5%または5cmのいずれか大きい方 |
|
(3)目標値
目標値は、各ビームの斜距離長を考慮し、水深に対する垂直方向及び水平方向それぞれについて、送受波器直下及び一番外側のビームに分けて算出することとする。本研究では、名古屋港及び扇島南東沖実験で収録したデータについて解析を行うため、それぞれの実験において、使用した機器の精度から目標値を設定した。
(a)名古屋港
KGPSによる測位及びPOS/MVを用いてデータ収録を行った。目標値を表3の通り設定した。
表3. POS/MVを用いた場合の目標値(KGPSによる測位の場合)
| 水深 |
垂直方向の目標値 |
水平方向の目標値 |
| 送受波器直下 |
外側ビーム |
送受波器直下 |
外側ビーム |
| 10m |
20cm |
25cm |
7cm |
48cm |
|
水深10mにおける目標値は、送受波器直下近傍において、20cm以上の地形あるいは凹凸による地形歪みの影響を取り除き、且つこの地形歪みによって移動した海底面画像データを水平方向7cm以上の精度で復元できることを示す。同様に一番外側ビームによって計測された水深値について、25cm以上の地形あるいは凹凸による地形歪みの影響を取り除き、且つこの地形歪みによって移動した海底面画像データを水平方向48cm以上の精度で復元できることを示す。
(b)扇島南東沖
KGPSによる測位及びDMSを用いてデータ収録を行った。これらの機器の精度を考慮し、調査海域の水深値(約20m)の目標値を表4の通り設定した。
表4. DMSを用いた場合の目標値(KGPSによる測位の場合)
| 水深 |
垂直方向の目標値 |
水平方向の目標値 |
| 送受波器直下 |
外側ビーム |
送受波器直下 |
外側ビーム |
| 20m |
20cm |
46cm |
13cm |
110cm |
|
2.3 データ収集及び取得データの評価
本研究で設定した目標値に対し、海洋情報部殿のご協力を得て、名古屋港において既知のターゲットを海底面に設置し、データ収集を実施した。また扇島南東沖においてもデータ収集を行った。
2.3.1 マルチビーム音響測深機で得られた海底面画像データの収集及び動揺データの検証
(1)データの収集
(a)名古屋港実験
(1)概要
名古屋港内、水深約8mの海底に既知のターゲット3台を設置し、データ収録を実施した。実験データ収録システムの概要を表5及び図6に示す。
SeaBat8101は、船底に設置されたソナーヘッド(送受波器)、船上収録装置に大別される。船上収録装置には、ソナープロセッサー、HYPACK MAXソフトウェアを用いてデータ収録を行うパソコン(以下、HYPACK収録装置)、DGPS受信機、動揺センサー、磁気コンパスで構成される。
測量データの補正を正確に実施するためには、それぞれのデータ受信機がもつ時計が正確かつデータの受信時刻の記録タイミングを一致させることが必須条件である。タイミングのずれ(時間遅れ)は、水深及び海底面画像データの位置精度、すなわち目標値の評価に大きく影響を与える他、海底面画像データの斜距離補正時のエラーの原因となる。
そこで、HYPACK収録装置のコンピュータに、時間合わせのソフトウェアをインストールし、30秒毎に自動的にコンピュータ時間をGPS時間(UTC)に合わせるようにした。
また、各センサーからの収録時刻の整合性を確認するために、HYPACK収録装置とは別のパソコン(以下、データ収録装置)にて同時収録を実施した。
表5. 名古屋港実験概要
| 測量 |
第四管区海上保安本部海洋情報部 |
| 実施日 |
平成14年11月14日、15日 |
| 測量船 |
いせしお |
総トン数:30トン |
| 全長:21.0m |
| 最大幅:4.5m |
| 深さ:2.4m |
| 喫水1.0m |
| 収集データ |
K−GPSデータ |
| 海底面画像データ及び水深データ |
| 潮位データ(気象庁名古屋験潮所のデータ) |
| 海域 |
名古屋港 |
| 機材 |
マルチビーム測深機: |
船底装備RESON社製 SeaBat8101 |
| データ収録: |
Coastal社製HYPACK MAXソフトウェア及びデータ収録用パソコン(HYPACK収録装置)及びデータ収録装置 |
| 動揺センサー: |
POS/MV型インテグレーテッド慣性航法装置(データ間隔:50Hz) |
| 測位機: |
KGPS |
| (陸上基準局: |
北緯35度05分19.57643秒、東経136度53分05.32034秒) |
|
| (拡大画面:46KB) |
 |
図6. 名古屋港収録システムの構成
測量船いせしおに設置した各機器の配置図を図7に示す。
| (拡大画面:28KB) |
 |
図7. 機器配置図
|