|
人命救助支援装置、エンジン非常停止装置「かえる」の信頼性確認結果
1)試作品信頼性確認実験結果(プレジャーボート実験記録から抜粋)
*試作品実験日 |
: |
平成13年2月20日 |
*主機関 |
: |
ヤンマーディーゼル(株)製、4LH−UTZAY型、80.9KW/3000rpm |
*実験船 |
: |
ヤンマー船、Toprun FX29Z型 |
*船名 |
: |
OCTAGON II |
*実験場所 |
: |
ヤンマー造船(株)本社、岡山事業部 |
(1)プレジャーボート信頼性確認実験結果評価表(抜粋)
| 回数 |
計測距離 m 発信機〜受信機 |
計測時の発信機の状態と操作方法 |
船舶の状態 エンジン rpm |
船舶停止距離 m |
エンジン停止 秒/操作総合結果 |
| 1 |
3 |
前向き、緊急ボタン |
係船、アイドル中 |
− |
0.5/OK |
| 6 |
10 |
背を向け、緊急ボタン |
同上 |
− |
0.5/OK |
| 7 |
20 |
前向き、緊急ボタン |
同上 |
− |
0.5/OK |
| 8 |
50 |
建屋陰、緊急ボタン |
同上 |
− |
0.5/OK |
| 9 |
50 |
前向き、緊急ボタン |
走行中、600 |
30 |
0.5/OK |
| 12 |
50 |
前向き、緊急ボタン |
走行中、2,000 |
50 |
0.5/OK |
| 14 |
50 |
発信機を水侵、エンジン停止自動発信 |
走行中、3,000 |
60 |
0.5/OK |
|
(注) |
以下アイドル中=アイドル回転でエンジン運転中。OK=完全にエンジン船体共停止 |
2)量産品信頼性確認実験結果
*実験船 |
: |
上記1)の実験船と同じ |
*量産品実験日 |
: |
平成13年7月12日 |
*実験場所 |
: |
ヤンマー造船(株)本社、岡山事業部 |
(1)プレジャーボート信頼性確認実験結果評価表(抜粋)
| 回数 |
計測距離m 発信機〜受信機 |
計測時の発信機の状態と操作方法 |
船舶の状態 エンジンrpm |
船舶停止距離 m |
エンジン停止 秒/操作総合結果 |
| 1 |
3 |
前向き、緊急ボタン |
係船、アイドル中 |
− |
0.5/OK |
| 12 |
80 |
背向け、緊急ボタン |
係船、アイドル中 |
− |
0.5/OK |
| 13 |
50 |
前向き、緊急ボタン |
走行中、1,500 |
25 |
0.5/OK |
| 16 |
50 |
前向き、緊急ボタン |
走行中、3,000 |
50 |
0.5/OK |
| 17 |
1,000 |
前向き、緊急ボタン |
走行中、3,000 |
不明 |
0.5/OK |
| 19 |
50 |
発信機を水侵、エンジン停止自動発信 |
走行中、3,000 |
25(逆風) |
0.5/OK |
| 21 |
5 |
仮定、転落水中1m後0.5mUP自発信 |
走行中、600 |
20 |
0.5/OK |
| 22 |
5 |
同上 |
係船、アイドル中 |
− |
0.5/OK |
|
(注) |
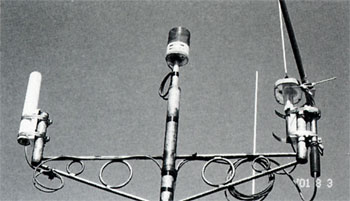
21、22項は、木棒2mの先端個所に発信機を衣切れで巻き縛り、発信機アンテナを0.5mUP個所に配置した装置を作り、仮定乗船者が海中転落後人体が浮き上がり停止信号を発信してエンジンを停止させる実験をした。 |
(2)信頼性確認結果(評価)
*実験要領に基づいてエンジン停止実験結果全てエンジンは停止した。
*船舶の走行中エンジン停止信号発信操作に於いてエンジンが停止、いずれも船速が落ちその後船体も停止した。
*船舶の停止位置は逆風の場合には追い風時より転落者のより近くで船体は止まることも知見した。
*基本動作以外にもパトライトを装備して、エンジン停止と同時にパトライトを点灯させる実験も実施。これもまた確実に作動する事が確認出来た。
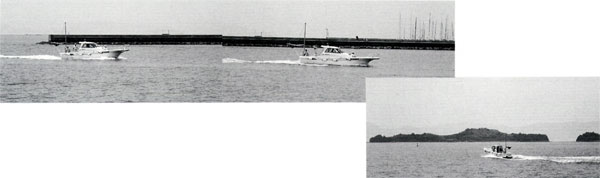
(3)実験中のPHOTO
走行実験中(約22knot) |
エンジン停止、手信号“○”が見える |
| (拡大画面:16KB) |
 |
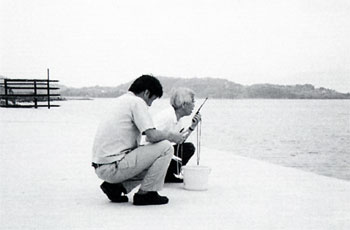
岸壁で停止信号発信
仮装置による実験中
走行中転落時を想定
3)実践漁船での信頼性確認
(1)実験船:実践漁船の概要
*船主船名:鳥取県境港市、牧野 良氏所属、第18漁栄丸、底引き漁船
*船体の大きさと船質:4.99トン型、FRP船
*船体の名称:ヤンマー船、BC−50F型
*主機関名:ヤンマーディーゼル(株)製、4HC30型、法30PS/2100rpm
*計画船速:11Knot/2100rpm
*実験日:平成13年8月2日
*実験場所:境港市中野港
(2)実践漁船での信頼性確認実験結果表
| 回数 |
計測距離m 発信機〜受信機 |
計測時の発信機の状態と操作方法 |
船舶の状態 エンジン rpm |
船舶停止距離 m |
エンジン停止 秒/操作総合結果 |
| 1 |
10 |
前向き、緊急ボタン |
係船、アイドル |
− |
0.5/OK |
| 2 |
100 |
前向き、緊急ボタン |
走行中、600 |
約15 |
0.5/OK |
| 3 |
100 |
前向き、緊急ボタン |
走行中、1,500 |
約40 |
0.5/OK |
| 4 |
100 |
背向き、緊急ボタン |
走行中、2,300 |
約70 |
0.5/OK |
| 5 |
20 |
乗組員が海中転落エンジン自動停止発信 |
実践走行中 1,500 |
約50 順風 |
0.5/OK |
|
(3)信頼性確認結果(評価)
*実験要領に基づいてエンジン停止実験と船体停止実験を実施した結果全ての実験でエンジンは停止した。
*エンジンは停止信号受信後確実に停止、船体もエンジン停止と共に船速が落ち後に停止した。
*特にこの実践実験においてはライフジャケットを着用した「仮想」乗組員が発信機を首に吊るし誤って艫から海中へ転落することの実演を取り入れたより実状に近く、また装置の基本動作、信頼性確認するための重要な実験を関係者の協力の下に実施する事が出来た。
*転落者は転落後1.5秒程度で頭から浮き上がり発信機アンテナが海面上に出てからエンジン停止信号発信、エンジン停止、船体も速度を落とし後停止した様(追風で移動)であった。
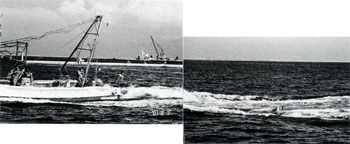
(4)実験状況のPHOTO
実践漁船実験船 準備中
実験に向かう
パトライト装備
乗組員転落前、後
船体停止、自力帰船中
*実験の結果装置類の操作は、発信機の取り扱い方と表示の確認のしかたについて試作品では「馴れ不足と、表示ランプの鮮明度」から取り扱い上の不安もあったが量産品の実験から解消でき不安はなくなった。
*実験時に船体への追い風も有りその勢いで船体はなかなか止まらなかった。
そんな中で船体は走行中とは逆方向を向いた(転落者の方向)状態になり船体もエンジンによる推進力がなければ、真直ぐ進まない事も知見した。
*転落した「仮想」乗組員はライフジャケットを着用して自力で泳ぎ自船に「かえろう」とするが泳ぎは難しそうであり、船体が追風を受けて前進する傾向にあったため約10分程度の泳ぎではあったが自船になかなか泳ぎ着く事は出来なかった。
*緊急時には衣類を脱ぎ全力で泳がなければならない場合があることも考えられる。
*自力で自船への到着後、疲れた状態でも乗船出来る環境、例えば、舷側に足掛けも出来る縄梯子の常時装備は欠かせない。
*今回の信頼性の確認実践実験で誤作動もなく完全に基本的動作を満足した。
*普及時には利用者に充分な取扱い方法など習熟して頂くことが大切である。
*特に港内、峡水路、船舶の混み合った場所での取り扱いなど注意し装置装着による事故防止、予防も欠かせない。
*総合的に判断した結果、人命救助支援装置、エンジン非常停止装置「かえる」を完成品として取り扱い、多くの利用者に普及して頂き当該事故の予防支援に是非役立ててほしいと考える。
|