|
ニイガタZペラ−2
2. 「ZP−41型」Zペラ
(1)はじめに
ニイガタZPシリーズはお陰様で多くのユーザの方々から数多くの販売実績と御好評をいただいてまいりました。その中で、この度ニューZPシリーズとして「ZP−41型」を開発致しましたので、その概要をご紹介致します。
(2)主要目
ZP−41型はZP−31型の一つ上の容量を持つ機種として設計されました。下記表に主要目の比較を示します。
| 項目 |
単位 |
ZP−41型 |
ZP−31型 |
| 入力定格馬力 |
kW(PS) |
1,913(2,600) |
1,545(2,100) |
| 入力回転速度 |
min−1 |
750〜1,000 |
750 |
| 駆動歯車減速比 |
|
3.42〜4.42 |
2.75 |
| プロペラ回転数 |
min−1 |
219〜226 |
273 |
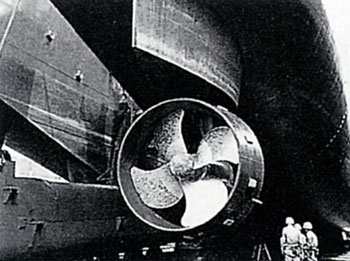
| プロペラ直径 |
mm |
2,700 |
2,200 |
| 静止推力(100%平均) |
kN |
345 |
267 |
| 台床直径 |
mm |
3,300 |
3,300 |
|
(3)開発のねらい
ZP−41型は、上記表に示す様に出力が1545kW〜1913kW(2100PS〜2600PS)であり、最近各方面からの御要求の多い高出力、高スラストに対応が計れる様設計されております。この出力レンジはこれまでのZPシリーズとしてはZP−4型となっておりました。しかし、ZP−4型は寸法的、構造的な面から本体質量も大きくなっておりましたので、船体との取合等も含めて、もっと小型化、軽量化が計れないか等お客様の御要望に充分お応えする事が出来ない部分がありました。
そこで、この出力レンジに対応したZP−41型は、多数実績のあるZP−21、31型の設計思想を取り込み軽量化を計ると同時に、台床径を3300mm(ZP−31と同等)を標準として設定致しました。合わせてこの台床径、プロペラ径もお客様の仕様に合わせ自由に設定出来る様本体に自由度をもたせてありますので、今まで以上にお客様のニーズによる最適な選定が出来るものと期待しております。
(4)納入のご紹介
ZP−41型は販売を開始させて頂いておりますが、既にお客様にてご使用頂いております仕様について以下ご紹介致します。
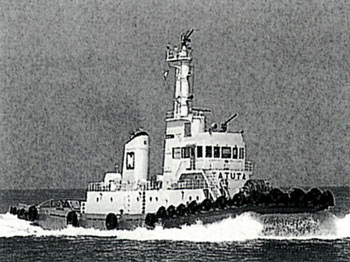
曳船として多数ZPを御採用頂いております内海曳船(株)殿でこの程ZP−41型を御採用頂きました。本船はエスコート対応曳船として最大速力16.30ktと曳船としては最も速い速力を出す事が可能となっております。
龍田丸
高速曳船兼化学消防船
内海曳船(株)殿
(株)神田造船所殿
推進機:ZP−412台搭載
主機:6L28H×2台搭載
定格出力:1,838kW×2台 (2,500PS)
竣工:平成12年5月
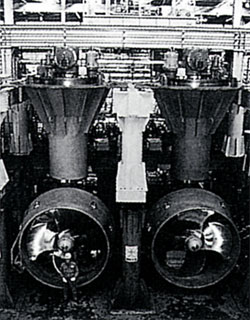
海翔丸
ドラグサクション浚渫兼油回収船
運輸省第四港湾建設局殿
石川島播磨重工業(株)殿
推進機:ZP−41 2台搭載
定格出力:1,500kW×2台
竣工:平成12年9月
この海翔丸は、外洋でも油回収可能な大型浚渫兼油回収船(全長:102m、幅:17.4m、総トン数:4,300トン)として北九州市に位置する運輸省第四港湾建設局関門航路工事事務所に配備され、通常時は関門航路を航行しながら海底土砂を吸込み、北九州空港予定地の用地造成のために埋立地へ運搬をします。
本船の据付の関係からZP本体中間部を伸ばした背の高い構造となっております。
ZP−41はこの他にもヨーロッパ向けに2台、国内向けとして2台の納入をさせて頂いております。
今後各地の港で活躍する曳船、作業船においてZP−41型が他のZPシリーズと共に船の性能向上に少しでも寄与する事を期待すると共に、今後共曳船業界、作業船業界の発展に微力ながらもお役にたてる様一層努力してゆく所存でございますので、お引き立ての程宜しくお願い申し上げます。
3. ネットワーク構成Zペラ・トータル制御システム
従来の「制御・監視システム」では制御系と監視系とは独立しており、センサーや配線の重複など複雑なシステム構成が一般的でした。
本システムは、制御系(主機、クラッチ、Zペラ及びシーケンス動作の各種制御)と監視系をネットワーク(※1)で結ぶことで、センサーや配線をシンプルにした高性能な制御監視システムです。
「分散制御・集中監視」方式の採用により、右舷と左舷及び制御系と監視系を構成する各基板は個別に動作し、万が一ある基板に異常が発生しても他の基板への影響は極力少なくなる構造となっております。
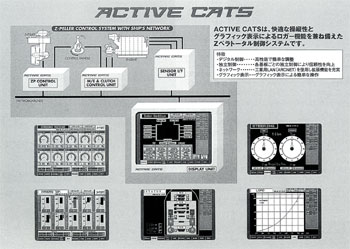
画面にはタッチ式液晶ディスプレイを採用し、画面操作はガイダンス式に表示されますので誰にでも簡単に操作出来ます。
圧力・温度等の表示画面は、視覚的に解り易いアナログメータをイメージしてグラフィカルに表示しております。
またネットワークを採用しておりますので、システムの拡張性にも優れております。
(※1)ネットワーク:工業用ローカルエリアネットワーク
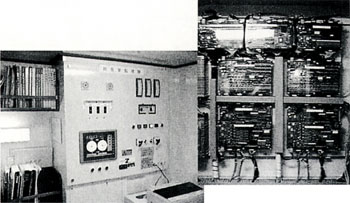
(1)構成
システム全体はネットワークによりデータを共有化し、センサー等を必要最小限に抑えています。また、各基板ごと個別に制御させトラブルの軽減を図っています。
(1)W/H表示制御基板
ブリッジ操縦盤付の各スイッチ入力、表示灯出力及びブザー出力を制御します。
(2)ZP旋回制御基板
本基板には、自動旋回速度コントロール機能、近回り旋回機能、オートパイロット・インターフェース機能等があります。
尚、Zペラ旋回制御基板には、サーボ弁タイプ、比例弁タイプがあり、旋回油圧ユニットの仕様により選択となります。
(3)主機&クラッチ制御基板
主機関及びクラッチ(オメガ式、電子コントロール式等のスリッピングクラッチを含む)の制御を行います。
(4)シーケンス制御基板
主機関の発停、警報制御、表示制御、予備ポンプ類の自動起動等のシーケンス動作を制御します。
| (拡大画面:144KB) |
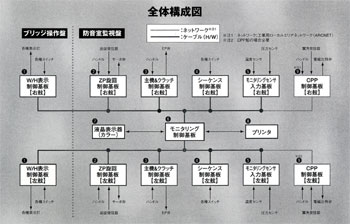 |
(5)モニタリングセンサ入力基板
圧力発信器、熱電対等のセンサ信号を入力します。
入力されたセンサ信号はデジタル処理され、モニタリング制御基板にネットワーク経由でデータ伝送します。
(6)モニタリング制御基板
各基板とネットワーク経由で通信し、Zペラ角度、主機回転数、温度、圧力等をリアルタイムにモニターします。
(7)液晶表示器(タッチパネル式カラー液晶表示器)
エンジン及びZペラの状態、警報の表示及び設定値の入力等を行います。
(8)プリンタ
エンジン及びZペラの状態、警報発生項目、各種設定値等を印刷します。
印刷モードとしてマニュアル印字、定時印字、アラーム印字等があります。
東京汽船(株)殿「長門丸」
(9)CPP制御基板(CPP船の場合、必要です。)
可変ピッチ・プロペラの翼角を制御します。
制御モードとして通常モード、消防モードがあります。
(2)おわりに
本システムの1号機は、今年(平成12年)7月に竣工しました東京汽船(株)殿の曳船「長門丸」(建造:金川造船(株)殿)に搭載され、ご好評を頂いております。
最後に船主殿、造船所殿のご指導、ご鞭撻に深く感謝申し上げますと共に、「長門丸」のご活躍をお祈り申し上げます。
| (拡大画面:173KB) |
 |
|