(1)測量船位置における高さ測量の成果と基本水準面高低モデルとの比較
GPSによる測量船の高さの成果と基本水準面高低モデルの比較を行った。図33に示すようにGPS測量により得られた海面の高さから基本水準面高低モデルによる精密基本水準面の楕円体高を引いた値、すなわち潮高は、潮汐観測から得られた精密基本水準面を潮位基準面とした潮位と等しくなるはずである。
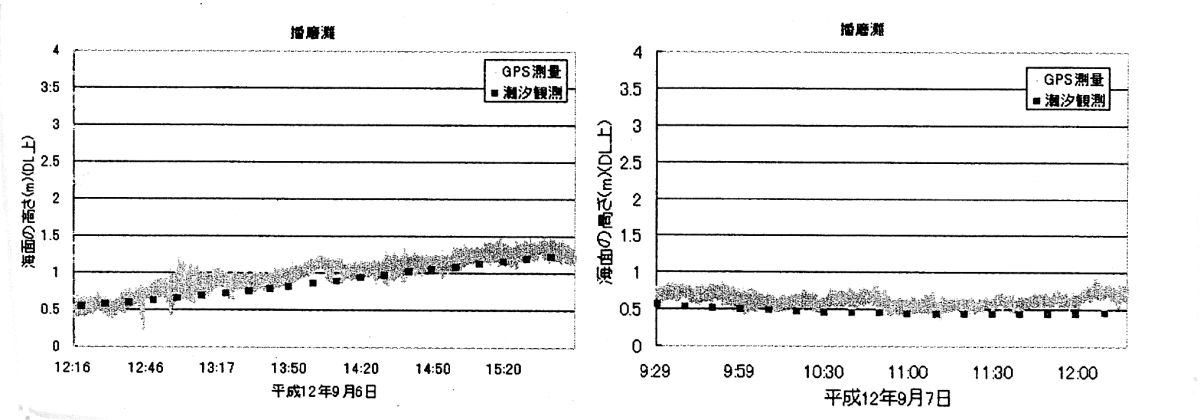
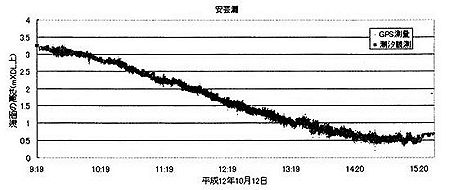
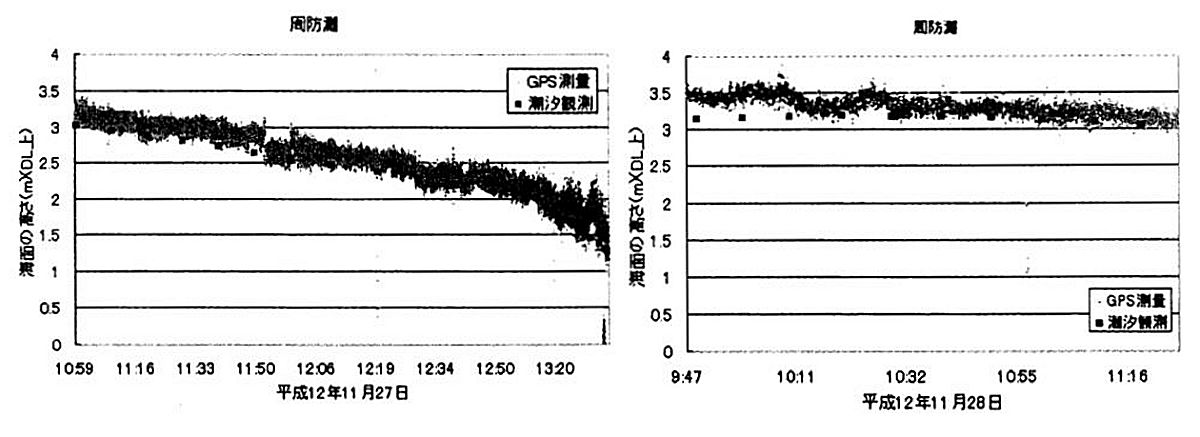
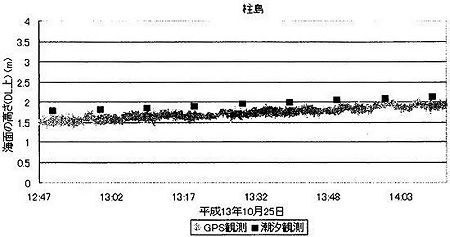
昨年度測量した播磨灘、安芸灘、周防灘について、本年度作成した51地点の基本水準面高低モデルを使用したK-GPS測量結果と潮汐観測結果による海面高を比較した結果、播磨灘を図34、安芸灘を図35、周防灘を図36に示す。また、本年度実施した柱島南方を図37に示す。この結果、播磨灘においては約10cm、安芸灘においては約5cm、周防灘においては約15cm柱島南方海域においては約20cmの較差が認められた。
昨年度の結果からも、瀬戸内海東側の播磨灘及び周防灘では、K-GPS測量結果の方が潮汐観測結果よりも高く、安芸灘では潮汐観測とK-GPS測量結果とほぼ同じである傾向が見られた。今年度実施した柱島南方では、昨年度の結果と異なり瀬戸内海西側におけるK-GPS測量結果の方が潮汐観測結果よりも高いという結果が得られ、昨年度の傾向と異なる傾向があることが認められる。
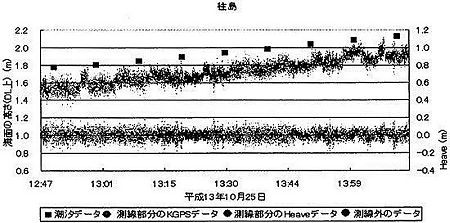
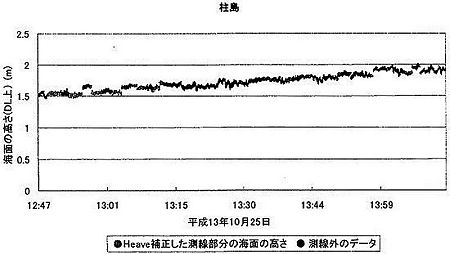
図38に柱島南方海域におけるK-GPS測量結果と潮汐観測結果とPOS/MV動揺センサーによる海面高の比較結果を示す。K-GPS測量結果を見ると、10cm〜15 cm程度の震動が見られるが、同時観測しているPOS/MV動揺センサーの動きとは一致しない。そこで、POS/MVによるHeaveの成分をK-GPSデータから差し引いてみた。K-GPS測量結果からPOS/MVのHeaveを引いた結果を図39に示す。この結果を見るとK-GPS測量結果は、高周波成分が無くなりK-GPSの潮汐による低周波成分のみが表現されていることを示すと共に、船の動揺による海面高変動すなわち高周波変動も示していることがわかった。
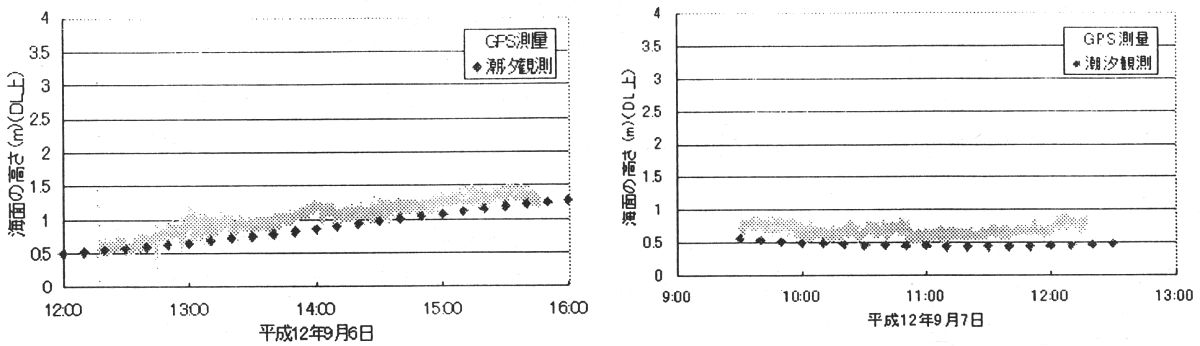
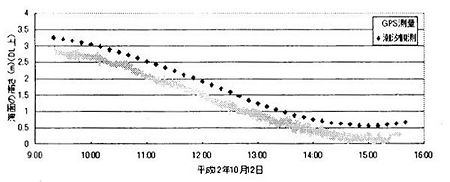
なお、図40に昨年度のモデルによる海面高の比較を示す。
(拡大画面: 67 KB)
図34. 播磨灘におけるK-GPS測量結果と潮汐観測結果による海面高の比較
図35. 安芸灘におけるK-GPS測量結果と潮汐観測結果による海面高の比較
(拡大画面: 74 KB)
図36. 周防灘におけるK-GPS測量結果と潮汐観測結果による海面高の比較
図37. 柱島南方海域におけるK-GPS測量結果と潮汐観測結果による海面高の比較
図38. 柱島南方海域におけるK-GPS測量結果と潮汐観測結果とPOS/MV動揺センサーによる海面高の比較
図39. 柱島南方海域におけるK-GPS測量結果からPOS/MVのHeaveを引いた値
(拡大画面: 56 KB)
(a)播磨灘におけるK-GPS測量結果と潮汐観測結果による海面高の比較
(b)安芸灘におけるK-GPS測量結果と潮汐観測結果による海面高の比較
図40. 平成12年度モデルによる海面高の比較