(3) 今年度の改善点
今年度の手法の改善点としては、主に以下の3点が挙げられる。
1) 重み付き移動平均処理の導入
本研究では求める予測水深の格子サイズを経度方向1分×緯度方向1分としているが、実際の経度方向の長さは高緯度になるほど短くなる。(例えば、緯度0度(赤道)における東西方向1分は約1.8kmだが、緯度60度での東西方向1分は約0.9km。)広い範囲で一括処理を行うと、この影響は無視できない。
そこで、一度に狭い範囲(数度四方程度)について水深予測を行い、水深を推定する領域を1/2ずつ重ね合せながら移動して重み平均をとり、全域の最終的な水深値を決定する。このことにより、緯度の違いによる格子形状変化の影響を削減し、かつ計算領域の境界線上での不連続を解消できる。
2) 陸地標高・海岸線を考慮した処理
昨年度、一昨年度は陸地を含まない海域について処理を行ってきたため、水深点だけを扱えばよかったが、今年度は対象海域内に島嶼や大陸などを含んでおり、その影響は無視できない。海岸線データと陸地標高データを加工処理に導入することで現実との整合性をとるようにした。
3) ロウパスフィルター処理時のパラメーターに関する試行
残差埋め戻し補正を行った段階での予測水深点データから直接等深線を作成すると非常に煩雑で不自然な描画になり、非実用的である。そこで、ロウパスフィルターによって整形処理をほどこすことにより無意味な情報を抑制した。その際のパス波長、カットオフ波長について数種類の試行錯誤を行い、もっとも妥当と思われる値(パス波長=14km、カットオフ波長=10km)を最終的に採用した。
以下、改善点の概要について説明する。
I. 重み付き移動平均処理を用いた水深予測の手順
手法の概要:
対象領域を1/2ずつ重ね合せて移動しつつ水深予測を繰り返す。その際、歪みを避けるため目的の範囲(数度四方)より広い範囲を計算領域とし、中央付近を抽出する。
最終的には重複する領域で重み付き移動平均をとり、全域の水深値を決定する。
手順:
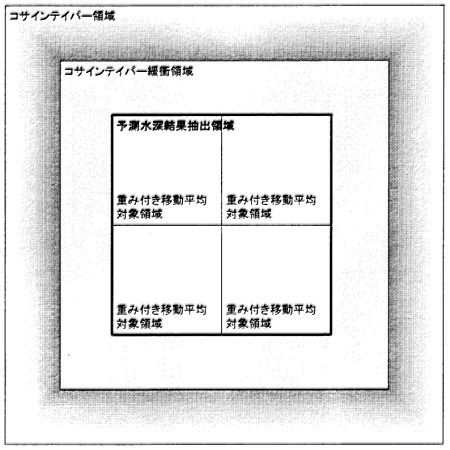
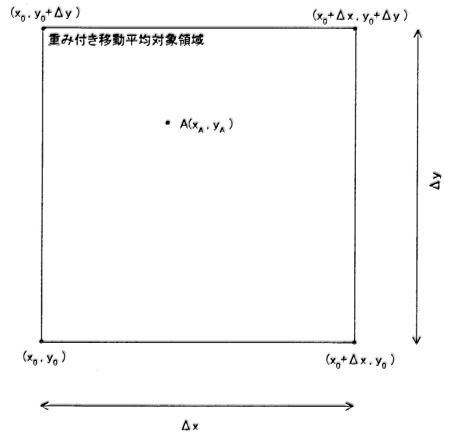
(i) 計算対象領域(コサインテイパー領域、コサインテイパー影響緩衝領域、水深予測結果抽出領域)を設定する。
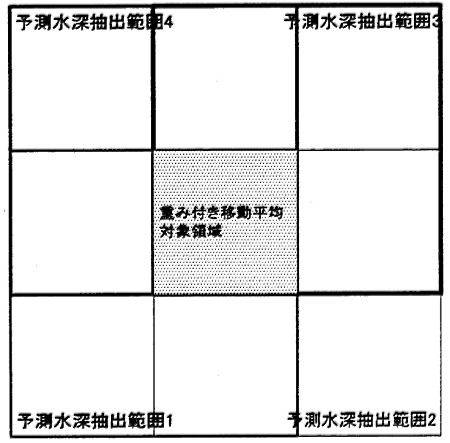
(ii)予測水深算出後、水深予測結果抽出領域を1/2だけ重ねて移動し、再度水深予測を行う。東西南北に移動を繰り返しながらこれを全域について繰り返す。(最終的には各格子点について4個の予測水深が決定される。)
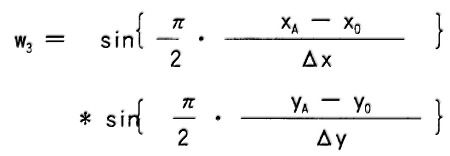
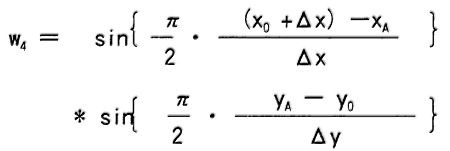
(iii)点A(xA,yA)における予測水深値(z1,z2,z3,z4)とその重みから点Aの予測水深値zAを求める。
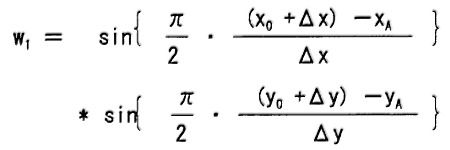
(イ)重み付き移動平均領域を第I象限とみなせる水深予測での値z1に関する重みw1は、
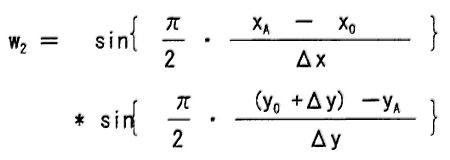
(ロ)重み付き移動平均領域を第II象限とみなせる水深予測での値z2に関する重みw2は、
(ハ)重み付き移動平均領域を第III象限とみなせる水深予測での値z3に関する重みW3は、
(ニ)重み付き移動平均領域を第IV象限とみなせる水深予測での値z4に関する重みw4は、
∴(イ)〜(ニ)より、点A(xA,yA)における予測水深値zAは
II. 陸地標高・海岸線を考慮した処理
昨年度、一昨年度は陸地を含まない海域について処理を行ってきたため、水深点だけを扱えばよかったが、今年度は対象海域内に島嶼や大陸などを含んでおり、その影響は無視できない。
本研究では海岸線データ(標高0m)を船舶観測水深点データや衛星観測重力異常データと同様に1分間隔の格子点に配置し、水深予測を行う際の観測水深点データの一部として取り扱うことで海岸線の存在を制限条件として導入した。
また、陸域データの重ね合わせば実用上のみならずデータセット作成作業上の観点からも重要である。予測水深の人工的なノイズ(バンドパスフィルター処理等で発生すると思われる短波長の周期的な構造)を抑制するためにロウパスフィルターで短波長成分の除去を行うが、その処理前に島嶼や大陸について予め適切な標高データを割り当てている。そうしない場合、陸地の凹凸を無視したフィルター処理結果となり特に陸地近辺で現実との差異が大きくなる。具体的な作業は以下の通りに行った。
(i)1分メッシュ海岸線データの加工
海岸線データとして米国地球物理データセンターが公開しているGSHHS(A Global Self-consistent,Hierarchical,High-resolution Shoreline Database)を用いた。これを本研究の対象範囲である北西太平洋地域において1分メッシュに加工した。加工にはGIS(Geographical Information Systems、地理情報システム)ソフトウェアArcInfoを用いた。
(ii)1分メッシュ標高データの加工
標高データとして米国地球物理データセンターが公開しているGLOBE(Global Land One Kilometer Base Elevation、全球陸域1kmメッシュ基準標高)を用いた。これを本研究の対象範囲である北西太平洋地域において1分メッシュに加工した。加工にはGIS(Geographical Information Systems、地理情報システム)ソフトウェアArcInfoを用いた。
(iii)予測水深への重ね合わせ
予測水深結果へ1分メッシュ陸域標高を重ね合わせるのには次の手順を踏んだ。まず双方のデータを(経度、緯度、水深(または標高))の配列に格納し、標高データが存在する点で水深データの値を標高データに差替えた。作業にはC言語プログラムを作成して対応した。
III. ロウパスフィルター処理時のパラメーターに関する試行
残差埋め戻し補正を行った段階での予測水深点データから直接等深線を作成すると非常に煩雑かつ不自然な描画になり、非実用的である。そこで、ロウパスフィルター処理をほどこすことにより描画の整形を図る。その結果、地形の特性が良く見えてくる。
本研究では、その際のパス波長、カットオフ波長について数種類の試行錯誤を行い、もっとも妥当と思われる値(パス波長=14km、カットオフ波長=10km)を最終的に採用した。
(4) 補正値等の算出方法の検討
1) 残差埋め戻し
本研究ではSmith and Sandwell(1994)の手法に準拠して水深予測を行っているが、まだ予測水深と観測水深の差の標準偏差は大洋底でも約250mある。予測水深に対し観測水深値に基づく補正を行う手段として、以下の手順を検討した。
(i) 観測水深値が存在する各点について予測水深と観測水深の残差rを計算する。
[残差r]=[予測水深Bp]-[観測水深Bo]
(ii) 残差rを対象海域全体に面的にスプライン補間する。
R:残差rのスプライン補間
(iii) 補間した残差Rを予測水深に埋め戻し補正予測水深Brとする。
[補正予測水深Br]=[予測水深Bp]-[残差スプライン補間R]
2) 伝達関数Sの周波数依存性について
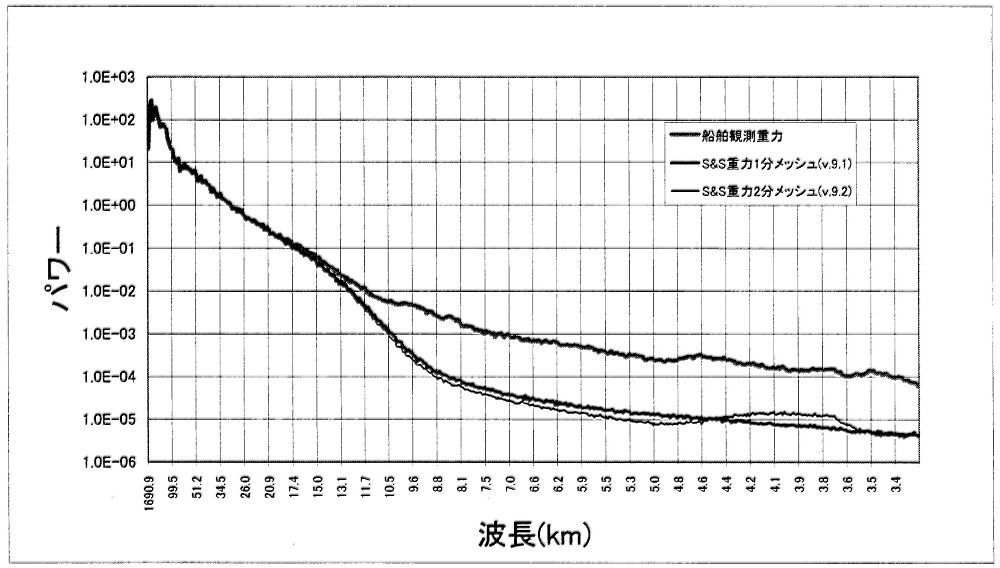
本研究で用いている伝達関数Sは本質的には周波数依存性を持つことが推測される。この点について確認するため、船舶観測による重力異常とSandwellらの研究グループが公開している重力異常1分メッシュ、同じく2分メッシュのパワースペクトルを比較した。(図2・13参照)船舶観測重力はMGD77に掲載されているものを用いた。具体的には、品質管理を行った観測水深点と同じレコードで重力異常も記載されているものを抽出した。パワースペクトルの算出にはGMTのgrdfftコマンドを用いた。
衛星アルチメトリに基づく重力異常のパワースペクトルは波長10km付近で船舶観測から算出されたフリーエア異常より顕著に低下する傾向がみられる。船舶観測の水深と重力のパワースペクトルの関係からSandwellらの研究グループが公開している重力異常データを補正できる可能性がある。
(拡大画面: 83 KB)
図2-13 船舶観測重力と衛星観測重力(S&S)のパワースペクトル比較(G1405)