・画像データから算出したカメラ位置。
・GPSデータから求めたカメラ位置。
ここで求めた両者のデータの差が大きければ、その分だけカメラでとらえた空間を再現した際に、実際の岸壁の形状を計測する誤差が大きいことになる。
従って、データの解析を進めてその誤差の要因を明らかにし、その対策を検討する必要がある。また、実験状況を撮影したVTRから、撮影時に取り付け金具の状態によって、金具全体とカメラが大きく振動していることが分かる。この振動が計測にどのように影響しているかを把握し、その対策等を検討する必要がある。
(1)計測機器の位置座標
取り付け金具の計測を行い、カメラ、GPSアンテナ等の計測機器の位置関係を明らかにするためにデータ処理を行った。
1]データ処理方法
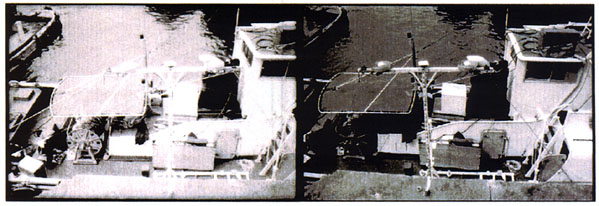
実験終了後にステレオカメラを使って、カメラ取り付け台を含めた金具を撮影し、写真計測によってカメラ取り付け台の位置、角度を求め、そこからカメラを架台に取り付けた際のカメラ位置および取り付け角度を算出した。
2]座標系の設定
各計測機器の位置を求めるために実施した、写真計測の画像データと、その解析結果を図4.1.1〜4.1.3に示す。