The base material and the hardener are homogeneously mixed by the automatic painting machine and airless sprayed. The start/end of painting are controlled by NC data depending on the instruction from the controller.
Ѓ@
3.Ѓ@SoftwareЃF
The operation data is automatically generated by a PC-based CAM system (so called CAMEX-Paint) linked with the structural data and the necessary painting attribute, which are output from a 3D CAD system (so called HICADEC-H) and a product model (so called PHI) in the shipyard CIM environment, and downloaded to the painting robot in the production.
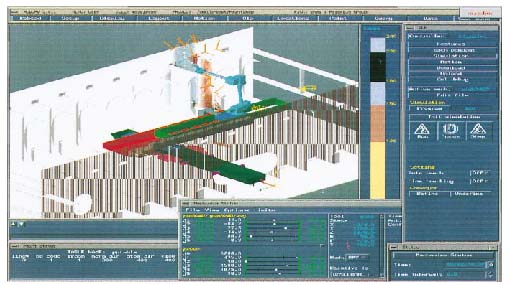
Furthermore, a simulation system of painting robot utilizing a software on the market (so called ROBCAD) has been also developed in order to support the operation as shown in Figure 2. It has been used for the purposes of the interference check between robot and work and the preliminary simulation of coating thickness of paint.
Ѓ@
4.Ѓ@Application to a VLCCЃF
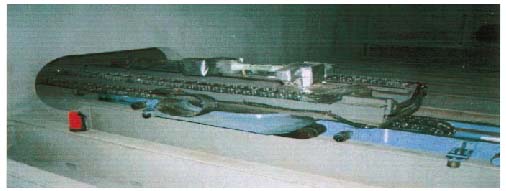
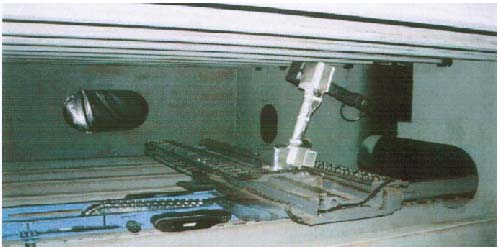
The developed painting robot was successfully applied to the building of 307,000-dwt type VLCC. Figure 3 shows the robot passing through the permanent opening of Floor. Figure 4 shows the status of robot painting in the closed double hull tank of the VLCC.
Painting robot technology is expanding in its importance as a part of new generation shipbuilding research, and it will be essential for modernization of shipyards which utilize to a maximum extent of highly sophisticated production system.
According to the challenge of Hitachi Zosen Ariake Works, the real automation of painting is close to reality. Metaphorically speaking to the development of submarine oil field, the Ariake Works has just started the real mining of crude oil finding a hopeful oil field at last after repeating trial diggings for a long time.
Ѓ@