ROV for Underwater Inspection of Oil Reserve Bases at Sea
At the request of the Japan National Oil Corporation, Mitsubishi Heavy Industries, Ltd. (MHI), together with the Shipbuilding Research Centre of Japan has developed a Remotely Operated Vehicle (ROV) to carry out under-water inspection of oil reserve vessels at oil reserve bases at sea.
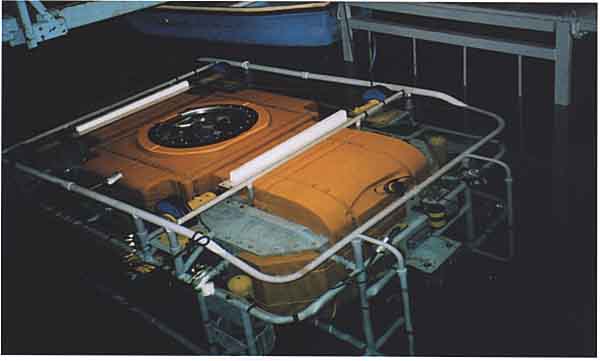
The ROV for underwater inspection is designed for remote inspection and checking of the underwater parts of the vast outer hull plates of oil reserve vessels moored to such bases. The unit is composed of the ROV main body provided with inspection equipment, a ROV remote control and observation device, underwater position measurement device, a winch for the tether cable, and related devices.
The ROV has functions which allow the vehicle to perform external appearance inspections, measuremnents of plate thickness, measurements of electric potential, and measurements of paint film impedance (for determining the condition of deterioration of paint film) while it is moving either in contact with or removed from the outer hull plate. Movement of the ROV is achieved through the operation of a manual remote control device or by automatic induction along a preset route for movement.
PRINCIPAL PARTICULARS
1. Extermal dimensions
Length……………abt. 4.3m
Width……………abt. 2.4m
Height……………abt. 1.6m
2. Weight……………abt. 5,50Okg
3. Diving Depth……………max.30m
4. Speed of movement……………max. 0.8knots
5. Movement devices
Thrusters (when ROV is not in contact with the shell plate)……………8 sets
Driving wheels (when ROV is in contact with the shell plate)……………4 sets
6. Inspection devices
TV cameras (with light)……………5sets
Plate thickness measurement device……………1 set
Electric potential measurement device. 1 set
Paint film impedance measurement device……………1 set
Inspection surface cleaning device……………1 set
7. Remote control and observation device……………1 set
8. ROV underwater position measurement device……………1 set
9. Tether cable……………800m
10. Winch for tether cable……………1 set