|
6 EXAMPLE OF EMERGENCY MANOEUVRE
6.1 Scenario description and objectives
The STCW Code emphasises a thorough knowledge of and ability to apply the procedures of search and rescue operations. The following extract is an example (Figure 10) of an emergency return manoeuvre well known as the "Scharnow Turn" (see [4] and [5].)
The Scharnow-Turn possesses some decisive advantages, e.g.:
・same initial phase of the Single-Turn (eventually change to Single-Turn during the manoeuvre, when missing person sighted),
・shortest time lapse returning the vessel to accident scene,
・continuous observation (outlook) from the same wing during the manoeuvre,
・longer time duration before shifting the rudder to counter-rudder
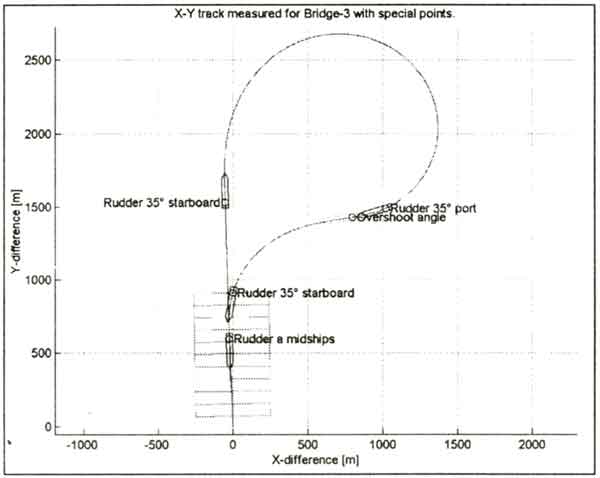
The main aim of this man over board manoeuvre is to return the vessel to the original track by the shortest route and with minimum loss of time. In practice the vessel initially follows the turning circle, and after shifting the rudder by a course change of about 240°,finally turns to counter rudder and amidships, the vessel then swings back to the opposite course at a certain measurable distance from the original track, respectively at a certain distance from the reference manoeuvre. The manoeuvring parameters which are used as reference values for evaluation of the Scharnow-Turn are given below in Table 5.
For the simulation exercise a schedule has to be developed in accordance with the evaluation scheme described above. Table 3 gives an overview of the main groups and headlines of the evaluation scheme corresponding to the applicable actions and considerations for the simulation.
Table 3 Schedule corresponding to evaluation scheme
| Area of Competency |
co-ordinate search and rescue operations |
| Objectives |
determination of accurate time and heading change for shifting
the rudder and counter rudder use of radar and GPS to observe position and marked
plot for return |
| Scenario Design |
selection Scharnow-Turn STB no further traffic, wind and current
zero, sea 1 use of internal and external communication
Container vessel LOA 217 m, BOA 30 m, Draught 10 m loaded, at open sea. Alert of man over board. Immediately introduce Scharnow-Turn to STB, perform most accurate manoeuvre and take all necessary steps and record data.
Use communication facilities (internal, external). |
| Assessment Parameters |
course, speed respective change and overshoot angle rudder
angle track, track deviation time parameter |
| Assessment Criteria |
deviation on opposite course to original track <250m
time difference to reference returning point < 1 min |
|
Figure 10 Reference outline for the Scharnow - Turn
X-Y track measured for Bridge-3 with special points.
6.2 Assessment parameters and criteria
Although a number of aspects could be considered for assessment, present investigation has focused so far on the main aspects only, that is, evaluation of returning the vessel to her original track and with minimum loss of time.
The parameters are listed in Table 3. The manoeuvre has to be performed by three rudder positions, e.g. hard to STB, when the event is noted, hard counter-rudder to Port at about 240°course change from original course and meet the rudder with hard to STB again, before the vessel swings back to the opposite course. The rudder angle and the exact time of shifting the rudder are the most important parameters for the successful manoeuvre and for assessment. The overshoot angle at about 240° course change is an important parameter. Only if the value is taken accurately, it is possible for the trainee to swing back the vessel to the opposite course at the right time. The track deviation is the result of manoeuvre performance and one of the main parameters for assessment. The allowable distance from the original track is depending highly on the visibility conditions. Table 4 shows the identification distance at day or night time and for different hydro-meteorological conditions. The instructor has to decide and adjust the criteria limits for the simulation exercise according to the environmental conditions.
Table 4 Identification distance at day and night time under various conditions [6]
|
Single person without survival Aid
|
Conditions |
Day-/night |
Identification |
| Good |
Day |
0,45 nm |
| Moderate |
Day |
0,27 nm |
| Moderate |
twilight |
0,12 nm |
| Good |
night |
0,05 nm |
| moderate |
night |
0,11 nm
(searchlight) |
|
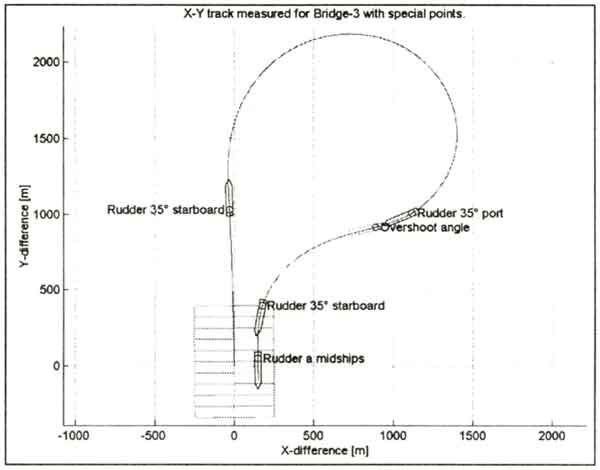
Figure 11 Example of a trainee's simulation run
X-Y track measured for Bridge-3 with special points
6.3 Exercise assessment using the evaluation tool
In the example the acceptable area of return is marked as a rectangle with the limitation defined as the criteria limit. If the allowable distance from the original track is defined e.g. < 250 m (max deviation at daylight and good visibility) and time difference of arrival by comparison to the optimal returning point e.g.< 1 min, the criteria net shows if the vessel returned within the limits or shifted beyond. With reference to the computer based assessment two prospective paths will be researched in ongoing trials. It is possible to evaluate the results very roughly in either of two categories only:
・"applied with" (returning point within limits),
・"not applied" (returning point beyond limits),
Alternatively, a more detailed pointing system may be used. This starts with the maximum number of points (returning on spot) and decreasing the number of points proportionately to distance removal from the criteria centre. If the vessel returns beyond the limits, penalty-points would be awarded.
After finishing the exercise the manoeuvring values for assessment will be calculated by the evaluation tool. The values available are listed in Table 5 and will be available to the instructor immediately after the exercise run on the PC. According to the selected criteria of the concrete exercise - < 250m difference in cross distance and < 1 min time difference to the reference manoeuvre - the vessel returns within the criteria limits. In this example the negative value of returning time is related to the earlier return but before reaching the original track. Strictly speaking the time criteria is only applicable if the vessel would return and enter into the left part of the assessment field by overstepping the turning circle. In this simulation run trainee's performance can be evaluated as being "applied with" according to STCW 95 requirement.
The output of computed results is shown in the right column of Table 5. The numeric values can be reviewed by calculation of significance. The last two fields in the table are the main criteria. Even in case of small deviations at the beginning but return into range of assessment field the result can be considered as successfully.
As an object in view the evaluation tool should be used for both options relating to the type of manoeuvre, evaluation and assessment according to concrete criteria limits and/or for simulation exercises by comparing reference data with actual simulation results.
Table 5 Manoeuvring values - reference-, actual-and difference to reference manoeuvre
| Parameter |
reference values |
trainee values |
deviation |
| Initial course |
359.4° |
359.5° |
+0.1° |
| initial speed |
21.5 kn |
22,1 kn |
+0.6 kn |
| time of hard rudder STB |
0:00 min |
0:00 min |
0:00 min |
| hard counter rudder to port at |
253.8°Heading |
247.6°Heading |
-6.2° |
| time of hard rudder port |
7:06 min |
6:52 min |
-0:14 min |
| overshoot angle |
9.7° |
10.5° |
+0.8° |
| Opposite Course/ Track (+ 180°) |
179.4° |
179.5° |
+0.1° |
| hard counter rudder to STB at |
190.5°Heading |
192.2°Heading |
+1.7° |
| time of hard rudder starboard |
10 min 14 sec |
9 min 48 sec |
-0 min 26 sec |
| cross distance to original track |
18 m |
147.2 m |
+129.2 m |
| time of rudder amidships |
11 min 2 sec |
10 min 40 sec |
-0 min 22 sec |
| deviation from original track on return |
< 250 m (criteria) |
< 250 m (criteria) |
+129.2 m |
|
CONCLUSION
For the reasons illustrated above it is apparent that computer based evaluation of simulation exercise runs are essential for the training of students and mariners. Not all necessary aspects that a simulator instructor should take into consideration can be measured or expressed as a quantified value for direct automatic CBE. In particular communication and individual situation-awareness aspects of bridge team member's actions are difficult to monitor and cannot be traced in the replay file after the exercise. However, for some of these crucial training elements and aspects it should be possible to find a "work around", i.e. methods to check the trainees response indirectly by other parameters.
The developed software tool at the MSCW offering at least a part computer based assessment, gives extra support to the simulator instructor, who will also in future be indispensable, and it offers a more objective evaluation of the seafarer's proficiency according to STCW 95.
REFERENCES
[1] Baldauf, M., Benedict, K., Böcker, Th., Felsenstein, C., Herzig, M. "Computer-based evaluation of ship handling simulator exercise results", INSLC, San Francisco, USA, 2002
[2] Benedict, K. "Integrated Operation of Bridge-Engine Room- and VTS-Simulators in the Maritime Simulation Centre Warnemünde", Conference on Simulation CAORF / JSACC 2000, New York, 3-7 July 2000, Proceedings Vol.1
[3] Hilgert, H., Baldauf, M. "A common risk model for the assessment of encounter situations onboard ships", Maritime Collision and Prevention, Chiavari Publishing, Surrey, England, 1996
[4] Benedict, K.; Hilgert, H. "Rueckfuehrung des Schiffes bei Mann-über-Bord-Unfällen", Part 1 HANSA, Hamburg, 1986
[5] Benedict, K.; Hilgert, H. "Optimising man-overboard manoeuvres", 15th Conference of Bulgarian Ship Hydrodynamic, Centre Varna, Proceedings Vol. 1, 1986
[6] Hahne, J., Tober, H., Brühe, B. "Rettung aus Seenot", Deutscher Kommunal-Verlag, 1987
AUTHOR' S BIOGRAPHIES
K. Benedict achieved his PhD's in Ship Dynamics and on Advisory Systems for Ship Operation. He is Professor/Senior Lecturer for Ship's theory and Vessel Traffic Technology and the Head of MSCW.
M. Baldauf obtained his Ph.D. in Safety Engineering and is presently employed as chief coordinator for research. He is involved in several projects dealing e.g. with AIS.
C. Felsenstein worked as Captain and received his Ph.D. in Nautical Engineering. He is engaged on two research projects dealing with problems of maritime training and education.
M. Kirchhoff took his diploma in the field of automation and control engineering. He is working on the development of the computer-based evaluation tool.
|