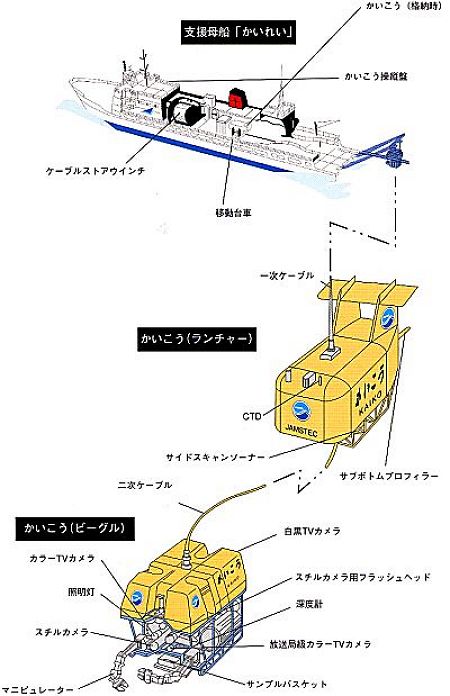
(2) 無人探査機「かいこう」「ドルフィン−3K」「ハイパードルフィン」
これらは、それぞれの母船(「かいこう」の母船は「かいれい」、「ドルフィン3K」の母船は「なつしま」、「ハイパードルフィン」の母船は「かいよう」)とケーブルで結ばれており、船上からのリモコン操作により、観察のみならずマニピュレーターを用いてサンプル採取などをすることができます。中でも「かいこう」は、ランチャー/ビークル方式という他の無人機とは異なった方式がとられています。すなわち、「ドルフィン−3K」等、一般的な無人機は、母船から繰り出されるケーブルに本体が直結された形で潜りますが、「かいこう」では、「一次ケーブル」と呼ばれる同様なケーブルが母船とランチャー(launcher:水中発射台)の間に取り付けられ、さらにランチャーと本体(ビークル)とは二次ケーブルによって接続されています。そして本体は、ランチャーに抱えられるような恰好で目的の深度近くまで潜り、そこでランチャーから発進されて、二次ケーブルの範囲内(約50m)で行動します。このシステムにより、1995年3月に、海の最深度(マリアナ海溝の10,911m)に到達することができました。なお、このランチャーには後述する「サイドスキャンソーナー」が装備されており、曳航型探査機として単独で使用することもできます。それぞれの無人探査機の概要は、以下に示すとおりです。
左:ビークル、カッコ内:ランチャー
| かいこうの仕様 |
| 全長 |
3.1
(5.2)m |
水中速力 |
前進 3.0ノット |
| 巾 |
2.0
(2.6)m |
上昇下降 1.0ノット |
| 高さ |
3.2
(3.2)m |
光ケーブル |
一次ケーブル |
45.0mm×12,000m |
| 空中重量 |
5.4
(5.4)t |
二次ケーブル |
29.5mm×250m |
| 最大潜航深度 |
11,000
(11,000)m |
|
|
|
「かいこう」は、母船とケーブルでつなぎ、船からリモートコントロールで動かします。「かいこう」では、ビーグル(探査機本体)が動きやすいようにランチャー(水中発着台)という方式を使っています。
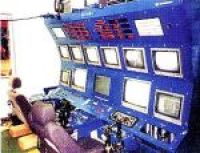
かいこう操縦盤
盤に表示されるビークルの放送局級TVカメラの映像やパノラマ映像等の情報を基本に操縦者(4人)が操縦します。
ドルフィン−3Kは、単独の調査のみならず「しんかい2000」の潜航海域の事前調査等に運用されていますが、最近では、沈船(ロシアのタンカー「ナホトカ号」や学童疎開船「對馬丸」など)や打ち上げに失敗して海中に没したH2ロケットの捜索にも活躍しました。また、ハイパードルフィンは、ドルフィン−3Kの高性能版といったもので、今後の活躍が期待されています。
カッコ内はハイパードルフィン
| ドルフィン−3K及びハイパードルフィンの仕様 |
| 全長 |
3.0
(3.0)m |
水中速力 |
前進3.0
(3.0)ノット |
| 巾 |
2.0
(2.0)m |
上昇下降1.0
(2.0)ノット |
| 高さ |
2.0
(2.0)m |
光ケーブル |
45.0mm×12,000m |
| 空中重量 |
3.7
(3.8)t |
29.5mm×250m |
| 最大潜航深度 |
3,300
(3,000)m |
|
|