2.4.4 マルチビーム測深データの処理・編集ソフトウェアの試作
(1)ロバスト推定処理のソフトウェア設計
(a) ロバスト推定処理について
現在市販されているマルチビーム測深データの処理編集ソフトウェアは、スパイク状の不良データを自動除去する方法として、任意の領域の水深データ群から水深の平均値を計算し、平均値からずれた水深データを不良データとして除去している。
この方法は、海底面を水深一定の面に近似するものであるが、実際には海底面は一定ではなく、複雑な形状をしている。また、水深の平均値をとることは、データ群に不良データが含まれている場合にその影響を受ける。この結果、既存のソフトウェアでは、スパイク状の不良データを完全に除去しきれていない。
不良データを除去するための海底面のモデル化は、海底を一定価に近似するのではなく、複雑な形状を表現できる現実的なものにする必要がある。
ロバスト推定手法を用いた不良データの自動除去処理の方法は、水深データから、海底面を3次元空間における2次曲面方程式にモデル化し、推定したモデルからずれた水深データを定量的に分別して、これを不良データとして除去するものである。
以下に、本ソフトウェアの処理対象データと機能について述べる。
(b) 処理対象データ
処理対象機種は、Reson社製のSeaBat9001、SeaBat8101、SeaBat8125などの浅海用マルチビームである。表26に、各機種のビーム数、探査幅、フットプリント、使用周波数を示す。
表26. 各測深機のビーム数、探査幅及び使用周波数
| 測深機 |
ビーム数 |
探査幅 |
フットプリント |
使用周波数 |
| SeaBat9001 |
60本 |
88.5° |
1.5°×1.5° |
455kHz |
| SeaBat8101 |
101本 |
150° |
1.5°×1.5° |
240kHz |
| SeaBat8125 |
240本 |
119.5° |
0.5°×1° |
455kHz |
(c)ソフトウェアの機能
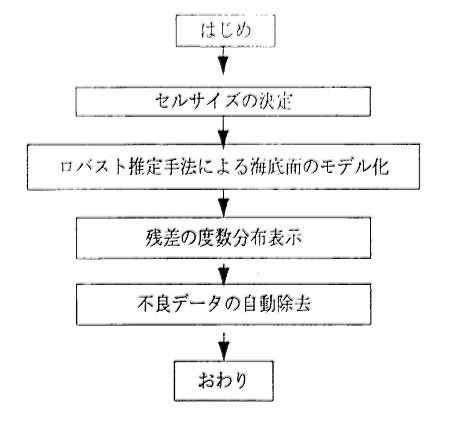
ロバスト推定手法を用いた不良データの自動除去処理の流れを図62に示す。これらの概要と本ソフトウェアの例外処理を以下に述べる。
図62. ロバスト推定手法を用いた不良データの自動除去処理の流れ
1)セルサイズの決定
モデル化する海底面は、局所的な海底地形を詳細に表現するため、調査海域をセルによって分割する。
セルサイズLは、単位を緯度経度基準の「秒」とし、セルサイズの入力範囲を、0.01秒から60秒とする。浅海用マルチビーム測深データの処理に対しては、0.3秒を基準とする。
セルサイズが入力されると、水深データを(x,y)平面に展開し、左上を基準にして調査海域をセルによって分割する。続いて、分割した各セルに対し、セル内に含まれる水深データを抽出する。
2)ロバスト推定手法による海底面のモデル化
調査海域を分割した各セルに対して海底面のモデル化を行う。海底面のモデルは、3次元空間における2次曲面方程式、
(1) 式
で与える。ここで、(x,y)は水深点の位置であり、zはその位置における水深値である。a1,…,a6は、係数パラメータである。
ロバスト推定手法による(1)式の係数パラメータa1,…,a6の推定は、まず、最小二乗法により、セル内に含まれる水深データから、残差平方和、
(2) 式
を最小にする係数パラメータa1,…,a6を最小二乗法により推定する。ここで、Nはセル内に含まれる水深点の数、^zi は(1)式による水深値である。
次に、係数パラメータa1,…,a6を(1)式に代入し、各水深点の位置(xi,yi)における水深値 ^zi、を計算する。そして、各水深点に対して、モデルによる水深値 ^zi、と測量した水深値ziから、残差の絶対値、
(3) 式
を計算するとともに、重み付き最小二乗法を行うための重みwi ( j )は、次式により与える。
(4) 式
(5) 式
ここで、rmは(3)式によって求めた残差の中央値である。αは無次元量のパラメータで、(4)式の重み量を調整する役割を果たし、逆感度因子と呼ばれる。
重み付き最小二乗法は、重み付き残差平方和、
(6) 式
を最小とする係数パラメータa1,,…,a6を(6)式から推定する。さらに(3)式から(6)式の繰り返し計算を行い、海底面の最適なモデルを推定する。ここで、jは繰り返し計算の回数である。繰り返し計算の停止条件は、
(7) 式
であり、X(j)は、
(8) 式
で与えられる。
逆感度因子αと繰り返し計算の停止条件ξは任意に与える。逆感度因子αは、8を基準とする。また、繰り返し計算の停止条件ξは、0.01を基準とする。
(2)式から係数パラメータa1,…,a6を求めるためには、数学的には6×6行例の逆行列を解く必要があり、セル内に最低6個の水深データが含まれていなければならない。
現実としては、セル内に含まれる水深データの個数が15以下の場合は、不良データが原因となり、最適なモデルを推定することができないことがある。そこで、本ソフトウェアでは、統計精度を考慮し、セル内に含まれる水深データの最低個数を15とした。また、逆行列の計算のアルゴリズムは、元の行列の余因子行列式を使用する方法を用いた。
3)残差の度数分布表示
調査海域を分割した各セルに対して、上記のモデル化計算を行い、残差zi- ^ziを求め、残差の度数分布図を作成する。残差の度数分布は、概ね平均0の正規分布を形成することになる。
表示方法は、横軸を残差、縦軸を度数分布の階級の幅に入る水深データの個数とする。度数分布の階級の幅は、0.01m、0.02m、0.05m、0.10m、0.20m、0.50m、1.00m、2.00m、5.00mの9種類からの選択とし0.01mを基準とする。また、横軸の表示範囲は、残差の最大値と最小値をもとに、自動調節するが任意に変更することができる。
4)不良データの自動除去
作成した残差の度数分布をもとに、残差が±0.50m以上のデータを一括して不良データの自動除去処理を行う。値は任意に設定することができる。
5)データの扱い方
計算対象とするデータの分布は以下の基準をもとに実施する。
セル内に含まれる水深データ数は、15個以上でなければロバスト推定処理を行わない。セル内に含まれる水深データ数が15個未満の場合は、周囲に存在するセルと結合して水深データ数を増やす。結合するセルの数は、まず4個とし、セル数を4個にしてもデータ数が15個未満の場合は、結合するセルの数を9個にする。結合するセルの数を9個にしても、水深データ数が15個未満の場合は、ロバスト推定処理を行わない。
結合するセルの数を9個以上増やさないのは、指定したセルサイズの10倍以上にするとユーザーがセルサイズを入力した意味がないからである。
上記の処理を施したにもかかわらず、結合したセル内に含まれる水深データ数が15個未満のときは、表27に従い処理を実施する。
表27. セル内に含まれる水深データ数が15個未満のときの処理
| 水深データ数 |
処理 |
| 15個未満のセルが、全体の10%未満の場合。 |
15個以上のセルに対して、ロバスト推定処理を行う。15個未満のセルに対しては、ロバスト推定処理を行わない、処理後、セルサイズを大きくして再計算するか、再計算を行わずに除去作業を続行するかの選択を表示する。除去作業を続行する場合は、未処理データを除去するか否かをユーザーが決定する。 |
| 15個未満のセルが、全体の10%以上の場合。 |
ロバスト推定処理を中止し、セルサイズ変更の選択画面を表示する。 |