2.4 K-GPSデータ及びマルチビーム測深データの処理・編集技術の開発研究
本年度に実施する開発研究項目は、下記の通りである。
(1)デジタル測深データの収集、整理
(2)不良データ除去処理の検討
(3)誤差判別方式の検討
(4)測深データ処理・編集ソフトウェアの試作
2.4.1 マルチビーム測深データの収集・整理
第六管区海上保安本部水路部殿のご厚意により、測量船の高さ精度の検証のための現地データを取得する際に柱島南方海域においてレソン社製マルチビーム測深機SeaBat8125により水深データを取得した。使用機材及びデータ収録方法は、表17及び図32に示した通りである。
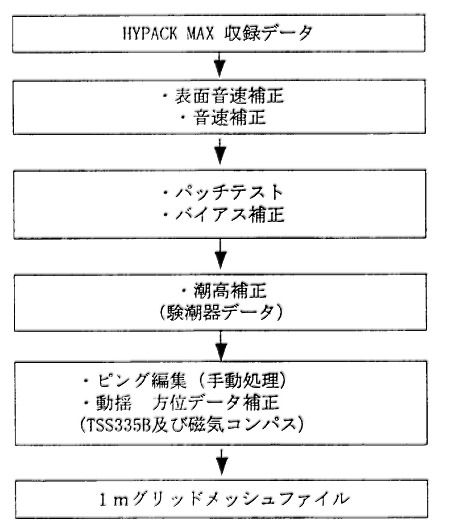
また、K-GPSデータ及び測深データの解析の方法は以下の通りである。
図45. 処理の流れ
上記で示した手順で処理を実施し作成した等深線間隔1m及び1mメッシュの水深図を以下に示す。
(拡大画面: 105 KB)
図46. 水深図
また、検証のため、同一海域において第六管区海上保安本部水路部殿が別時期に実施したレソン社製マルチビーム測深機SeaBat9001によるデータも収集・解析を行い比較検討した。
入手したマルチビームデータは、それぞれソナーヘッドの形状が異なる。SeaBat8125はフラットアレイタイプ、SeaBat9001はサーキュラーアレイタイプである。
これらソナーヘッドの形状の違いはデータ取得時の条件により問題を生じることがある。
SeaBat8125のようなフラットアレイタイプのソナーヘッドでは、直下水深取得付近から両端に向かっての照射角度の変化に応じて、屈折角も変化する。このとき適切な音速または水温値がわかっていないと屈折角補正が正しくできない。
実際の音速が機器の設定値より遅い場合には中心部が浅くなり、速い場合には深くなる。この浅くなる現象を断面図で見ると、平坦面の場合中央部が持ち上がった形状に見えることから、この断面をスマイルカーブと呼び、深くなる現象をアングリーカーブと呼ぶ。
通常、フラットアレイタイプのソナーヘッドを持つ機器のプロセッサーには、常時、音速ないしは水温値が取得できるようになっており、プロセッサー内部で補正を実施してデータ出力が出来るようになっている。
一方、SeaBat9001のようなサーキュラーアレイタイプのソナーヘッドでは、ソナーヘッドにおける音波の入射角が一定で、音速による屈折角の変化が生じないため、前者のような問題は生じない。