[17] リモートセンシングを用いたメガフロートの事後評価に関する研究
今井康貴(広大)
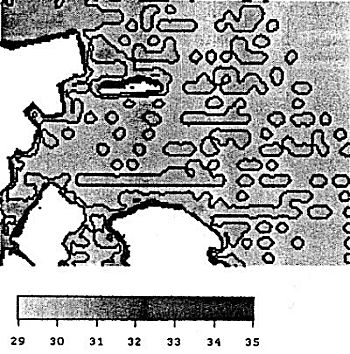
東京湾におけるクロロフィル(植物プランクトン)濃度算出のためのリモートセンシング解析法を開発し、それを人工衛星が像に適用することによって水温・クロロフィル濃度の変動を求めた。可視域および赤外域における人工衛星画像分析することにより、メガフロート設置による周辺海域への影響をみた。フェーズII実証実験による流況への影響は、ほとんど無いことが観察された。
メガフロート周囲の水温分布図(2000年7月11日)
[18] GPSによる洋上波浪計測(第1報) ―トレンド予測フィルターTPF(実時間フィルター)の開発―
一色 浩(日立造船)
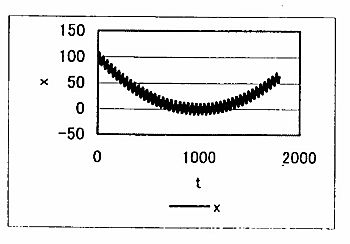
著者らはGPSアンテナ変位の変動成分を、1、000kmオーダーの長基線で、センチメートルの精度でほぼ実時間で計測する技術を開発した。しかし、この方法は、生データをハイパスフィルターに通して、必要な帯域成分を取り出すので、遮断周波数が低い場合には、時間遅れが大きくなってしまう。本報では、GPS信号の特徴に基づく時間遅れのないフィルターを開発し、GPSの信号処理に応用した。衛星と受信機のアンテナ間の距離は、Fig.1に示されるように、衛星の移動による放物線型の変動と、受信機アンテナの変動による細かい変動よりなる。本報で開発したTPFを用いると、放物線型の変動成分を落とすことができる。
Fig.1 Raw datum
[19] 海底に置かれたトランスポンダーの精密位置決め(第2報) ―測定原理と誤差解析―(英文)
一色 浩(日立造船)
高精度GPS技術と最先端の水中音響技術を用いると海底のトラポンの位置をセンチメートルの精度で求め得る原理的な可能性について述べると共に、種種の要因で生まれる誤差の影響について検討する。表に示されるように、海中音速分布の推定を同時に行う計測法は、精度向上の上で極めて有効である。o、p、q、rは、水中音およびGPSの精度を示す。oはfull precision、 pは10μs、1cm、qは10cm、rは1mの精度を表わす。2.5 degなどは、海面トラポン配置の対称性を示す。海底トラポン位置は、0が正解。
Horizontal position of the bottom transponder. The underwater acoustic velocities are calculated. The initial velocities are C [0]=1,450 m/s and C[1]=1,450m/s.
| |
2-3-1
0deg |
2-3-2
2.5deg |
2-3-3
5deg |
2-3-1
10deg |
| oo |
0.0000m |
0.0000m |
0.0000m |
0.0000m |
| pp |
0.0000m |
0.0013m |
0.0068m |
‐0.0045m |
| pq |
0.0000m |
0.0027m |
‐0.0075m |
0.0168m |
| pr |
0.0000m |
‐0.0075m |
0.1423m |
‐0.0783m |
[20] 海洋環境総合観測ロボット「Flying Fish」の開発研究 ―運動制御の高精度化(第2報)―
山口 悟(九大応力研)、横引貴史(九大総理工)、小寺山亘(九大応力研)
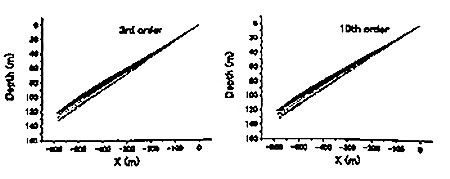
曳航式海洋観測装置は海洋観測における有効な装置であるが、観測中はその運動を高精度に制御する必要がある。本報告では、曳航体の運動制御システムの設計に対する翼に発生する非定常揚力の影響について調査した。また、曳航システムにおいて支配的となるケーブル運動を、解析解より導かれる固有関数の和で近似し、このモデルに基づいて運動制御系を設計する手法を開発した。さらに、設計された制御系を実海域実験で使用した結果について報告する。
Cable shapes during a depth change