|
3. ひずみ計測システム
3.1 システムの概要
前節で述べた計測方法を実現するひずみ計測システムのハードウェア構成をFig. 4のブロック図に示す.本システムはひずみセンサモジュールおよびデータ収録とコンピュータとの通信制御を行うモジュールの2つで構成される.
ひずみセンサモジュールは,PVDFフィルム等の圧電材料と配列型プローブ,14チャンネルひずみセンサ用インターフェース回路から構成される.このモジュールは圧電材料のひずみを検出して電気信号に変換し,検出信号のノイズ除去・増幅等のコンディショニングを行う.2番目のデータ収録・制御モジュールは高速の多チャンネルデータ収集システムであり,ひずみセンサモジュールで検出したひずみ信号をサンプリング後,アナログ信号のデジタル化を行い,RS-232シリアル回線を通じてコンピュータヘ計測結果をデータ転送し,計測作業全般に関わる制御を行う.
Fig. 4 Block diagram of the hardware system.
Fig. 5 Array of sensing element.
Fig. 6 Sensor interface circuit.
3.2 ひずみセンサモジュール
圧電材料とチャージアンプを使用するひずみ計測法においては,センシング要素としての電極を圧電材料の表面に取り付けることが原則である.1つ電極について1つのチャージアンプが1点の計測点を得るために使用される.したがって,n個の測定点についてはn組の電極とチャージアンプのセットが必要となる.
本研究で製作したひずみセンサモジュールは14チャンネルを有し,14点のデータが同時計測可能である.また,Fig. 5に示すように,圧電材料表面に接触する電極を,厚さ1mmのシリコン樹脂製の導電ゴム(鬼怒川ゴム工業製S60)で円筒形に作成し,直径1.5mmを始めに4種類用意した.これらの導電ゴム電極をプリント基板(PCB)に作成した銅電極の上に一列に配置して接着し,それぞれ電気配線でチャージアンプに接続する.シリコン導電ゴムは柔軟であるので加工し易く,圧電フィルムによく密着する.
Fig. 6にチャージアンプと電圧増幅回路で構成されるセンサ用インターフェース回路を示す.圧電材料のひずみ変化によって生じた圧電材料表面の電荷は,プローブで検出した後に電気配線を通じてセンサ用インターフェース回路に入力される.チャージアンプはその電荷を電圧信号に変換する.
PVDFフィルムは電気的には電圧電源VpとコンデンサCpを直列結合した回路に等価と考えられる.VpはPVDFフィルムのひずみに比例して生じる電圧であり,CpはPVDFフィルムの静電容量である.チャージアンプの出力電圧VcはPVDFフィルム上の電荷qpとフィードバック静電容量Cfの比率に依存し,(2)式で与えられる.
ここで,PVDFフィルムの静電容量Cpは(3)式で与えられる.
ただし,ε0は真空の誘電率,εrは比誘電率で材料固有の値であるので,Cpは圧電フィルムの面積Apと厚さtpに依存する.電荷増幅にはCpを用いるだけでよいが,回路部品の熱影響などを排除し,安定して電荷増幅を行うためにはFig. 6中の抵抗Rfが必要となる.このためチャージアンプ回路はバンドパスフィルタを形成し,遮断周波数の下限と上限はそれぞれ(4)式と(5)式で与えられる.
ただし,Rinはチャージアンプの入力抵抗であり,Rcrは導電ゴムの抵抗値,Ccは電線の静電容量である.
(4)式,(5)式は,2式で与えられる周波数範囲内でひずみ計測が可能であることを意味しており,静ひずみは計測不可能であることも示している.低周波の変動速度を計測するように回路設計を行った場合,遮断周波数の上限は一般的には数kHzとなるので,構造部材のひずみ計測用途においては(4)式の遮断周波数の下限値の設定が重要となる.回路定数の適切な設定により,0.05Hzから0.1Hz程度の低周波のひずみ信号の計測は可能である.なお,チャージアンプからの出力信号Vcが非常に小さく信号増幅を必要とするときは増幅率R2/R1の増幅回路を使用する.最終的に,ひずみセンサ用インターフェース回路の出力電圧Voutは次式となる.
センサ用インターフェース回路の設計にあたっては,(3)式で示される圧電材料の静電容量Cpつまり圧電材料の寸法に応じて,かつ,計測するひずみ信号の周波数仕様を満足するように遮断周波数の上限値fHCと下限値fLCを設定して,電荷増幅回路の回路定数Rf,Cfを決定する必要がある.
3.3 データ収録・制御モジュール
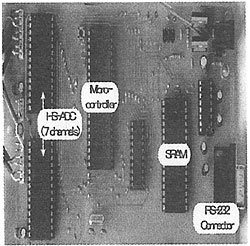
データ収録・制御モジュールはハードウェアシステム全体を管理する.Fig. 7に示すように本モジュールの主要な部品はマイクロコントローラIC(Microchip社製PIC16F877)と,高速アナログ−デジタル変換器(ADC),そして静的ランダムアクセスメモリ(SRAM)である.このモジュールは以下の機能を持つ.
・全てのハードウェア制御プロセスを決定する.
・多点のアナログ信号をデジタル信号に同時変換する.
・計測データを一時的にメモリ空間に保存する.
・パーソナルコンピュータとの通信を管理する.
Fig. 7 Data acquisition and control module.
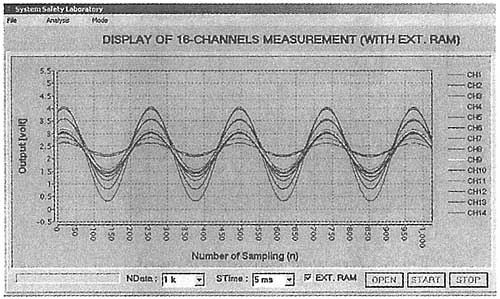
本ハードウェアシステムを用いて計測を行うためには,ハードウェアシステム上で動作し,計測システムを直接制御するソフトウェアとハードウェアシステムの動作設定を行い,計測したデータを処理・保存するパーソナルコンピュータ用ソフトウェアが必要である.ハードウェアシステム制御用ソフトウェアはモジュール部品の動作管理と処理タイミング同期を行い,コンピュータ用ソフトウェアは,計測したデータの数値表示,および,グラフィカルな表示,信号解析を行う.Fig. 8に作成したコンピュータ用ソフトウェア上に計測結果を表示させた様子を示す.
Fig. 8 Sample of measured result by developed software.
|