|
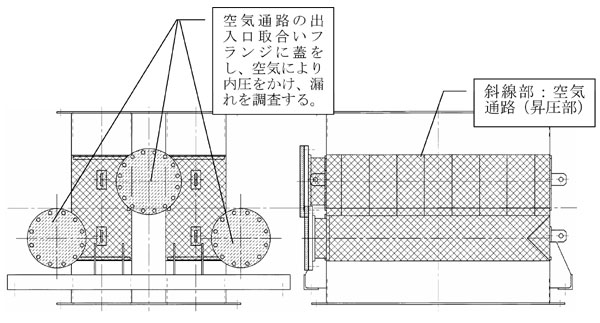
図1.3-20 プレートフィン型熱交換器 空気側漏れ検査要領図
1.4.1 全体構造
(1)試験機の設計
SMGT2試験機のパワーセクション部断面図を図1.4-1に示す。ガスジェネレータ部はSMGTのV型と基本的に同じ構造であるが、燃焼器ケーシングの空気取り入れ孔が熱交換器と空気配管との取り合いの影響で1.5°程度上向きに傾いた。パワータービンモジュールはガスジェネレータとの取り合いおよび出力軸カップリングとの取り合いは同じにして新規に設計を行った。
SMGT2では、前述のように細管型およびプレートフィン型の熱交換器を製作し、それぞれガスジェネレータと熱交換器間の空気配管を設計した。図1.4-2に細管型熱交換器を搭載したSMGT2エンジン外観装備図、図1.4-3にプレートフィン型熱交換器を搭載したSMGT2エンジン外観装備図を示す。パワーセクション部及び熱交換器のサポート方式はSMGTと同じである。ガスジェネレータと熱交換器間の空気配管もSMGTと同じシステムであるが、SMGTで後から追加した熱交へ流れる空気をバイパスする配管系統を最初から設けており、熱交空焚き等の作業効率化を配慮している。
また、熱交換器のガス側フランジ形状は細管型とプレートフィン型で共通化し、パワータービン出口から熱交換器入口のダクトおよび熱交換器出口のダクトはいずれの熱交換器を用いた場合でも共用可能な構造とした。
また、実船に搭載する際に重要となる急負荷遮断時等に対し安全に追従する機能を兼ね備える必要がある。このために、平成16年度に、スーパーエコシップ搭載用の減速機、出力軸カップリングへの交換のための設計変更、さらに、放風弁を追加するため、ガスジェネレータと熱交換器の間の配管の設計変更を行った。耐久試験終了後に陸上で、急負荷遮断試験を実施し、負荷追従機能の実証を行なった。
(2)試験機の製作
平成14年度は、慣らし運転および各種調整試験のためにガスジェネレータモジュール、パワータービンモジュールを合わせてパワーセクションを組立て、運転試験設備へ搬入、据付を行った。
平成15年度は、第2回耐久試験のために、プレートフィン型熱交換器用のガスジェネレータと熱交換器間の空気配管を製作し、プレートフィン型熱交換器とともに、試験装置設備へ搬入、据付を行った。
平成16年度は、第3回耐久試験後に実施した急負荷遮断試験のために、舶用仕様の出力軸カップリング、減速機、熱交換器配管類を製作し、試験装置へ搬入、据付を行なった。
図1.4-4、図1.4-5にパワーセクション組立外観写真を、図1.4-6に試験装置への据え付け写真を示す。
1.4.2 制御システムの設計
(1)起動制御方式の検討とシミュレーション検証
SMGT2は2軸式ガスタービンであり、実際の運用ではパワータービン回転数を制御することにより出力の制御が行われる。しかし、起動制御においては、2軸式ガスタービンの場合にも一般的にはガスジェネレータ回転数の制御により昇速が行われる。したがって、実船での運用を考慮した場合、起動のプロセスにおいてガスジェネレータ回転数の制御からパワータービン回転数の制御へ移行させる必要がある。そこで、その制御方式について検討を行うとともに、シミュレーションによる事前検証を行った。
SMGT2の起動制御では自立回転数まではガスジェネレータ回転数の加速度制御により昇速を行い、自立回転数に到達した後は回転数制御によりガスジェネレータ回転数が自立回転数に保持される。その後ガスジェネレータ回転数を昇速していき、パワータービン回転数の制御へ移行させ、パワータービンの定格回転数(無負荷定格回転)まで到達させる制御方式について設計検討を行った。図1.4-7に、自立回転数から無負荷定格回転までの起動制御方式の概念図を示す。
制御方式の妥当性を検証する上では、実機への適用に先立ってシミュレーションによる事前検証を行い、問題なく起動が行えることを確認した。図1.4-8には、自立回転数から無負荷定格回転までの起動制御についてシミュレーション検証を行った結果を示す。
(2)実船搭載向け制御システムの基本設計
1)負荷変動制御のシミュレーション検証
舶用主機では操船にともなう負荷変動が頻繁に行われるため、それに対する制御応答性は十分な操船性能を確保する上で重要であるばかりでなく、負荷変動に対する制御応答性については船級規則においても規定されており、これをクリアできることが必須である。そこで、実機エンジンでの負荷変動試験に先立ち、シミュレーションにより上記のような制御応答性の実現可能性について検証した。
シミュレーション検討では、SMGTで得られたエンジン特性をもとにしたシミュレーションモデル(図1.4-9)を用い、実船で想定される負荷変動のうち代表的な以下のパターンについて、制御応答性を検証した。
(1)港内操船:港内での離着桟時の操船パターンのうち、もっとも負荷変動が激しいパターンを想定
(2)レーシング:荒天時の航行中に、波浪により船体が海面から浮き、推進器(プロペラ)が空転した場合の負荷変動を想定
(3)クラッシュアスターン:船舶が緊急停止する際の推進力逆転操作を想定した負荷変動パターン
(4)発電機トリップ:発電機が不測の事態によりトリップした際の、瞬時全負荷遮断を想定したもの
1例として、クラッシュアスターンのシミュレーション結果を図1.4-10に示す。
以上のシミュレーション検討を経て、負荷変動制御の各種パラメータ調整、および必要に応じて制御方式の改良を行い、それぞれの負荷変動パターンに対して船級規則に適合できる制御応答性の実現可能性について見通しを得た。
2)船級対応制御システムの基本設計
ガスタービン船の場合には、制御システムの故障を想定すると、仮に手動操作でのバックアップを設けていても、ガスタービンの起動・操作は手動では困難である。そのため、制御機能の主要な部分に関しては二重化によるバックアップを考慮しておく必要がある。これに基づいて、実船搭載用制御システムにおけるシステム構成を検討し、万一の故障の際にも主要制御機能に関する部分の機能が損なわれないような構成について基本設計を行った。
また、これをさらに進め、実船搭載を考慮した制御システム全体および故障診断・遠隔監視システムのシステム構成について基本設計を行った。さらに、制御システムと機関関係の主要機器とのインタフェースについても基本設計を進めた。図1.4-11には制御システムと機関関係の主要機器とのインタフェース構成案を示す。
3)急負荷遮断時の負荷追従性制御
推進用ガスタービンとして実船に搭載する上でもっとも重要な負荷追従機能について、設計および陸上試験機による実証試験を行った。二軸再生式ガスタービンは、出力軸がフリータービン形式であること、再生器による熱回収があることから、負荷急減時にオーバースピードしやすい特性を持っており、負荷追従制御の中でも急負荷遮断時の追従性がもっとも重要である。このことから、急負荷遮断時の負荷追従性制御に対する検討を中心に検討を行った。
a)フライホイールの検討
急負荷遮断時のオーバースピードを回避する方法の一つとして、フライホイールにより回転エネルギを吸収する方法が考えられる。本研究開発でもシミュレーションによりその可能性を検討してきたが、SMGT2では燃料を最小流量まで絞っても再生器から回収される熱エネルギによりパワータービンが加速されるので、フライホイールだけでは十分ではないことがわかった。仮にフライホイールだけでオーバースピードを回避しようとすると、非常に大きなフライホイールが必要になり、実船搭載を考えた場合現実的ではない。そこで、次節で述べる放風弁制御を併用してオーバースピード回避を図ることとした。
b)放風弁制御の検討
放風弁はガスタービンの作動流体の一部を大気に放出することで、再生器からの回収熱量を減らしオーバースピードを回避しようとするものである。SMGT2では、構造上の利便性から遠心圧縮機出口と再生器の空気側入口との間に設けた。当初は、放風制御弁のみによって放風制御を行うことを計画していた。しかし、放風制御弁は動作速度が遅いため急負荷遮断に追従できないこと、ON/OFF動作弁のみでは開閉動作を繰り返してしまうことから、図1.4-12に示すように放風制御弁と放風開閉弁を併用する構成とした。
c)フライホイール、放風弁の選定
上記したフライホイールおよび放風弁は、オーバースピードを回避するために適切なスペックを有していなければならない。フライホイールは実現可能な範囲でできるだけ慣性モーメントが大きい方が望ましく、放風弁については適切なCv値とできるだけ応答速度の速いものが望ましい。これらの選定については、現実的に選定可能な範囲でシミュレーションによる検証を行い適切なスペックを決定した。
|