|
HOW TO SIMULATE THE GAP BETWEEN REALITY AND HUMAN PERCEPTION OF 'REALITY' IN NAVIGATION AND SHIP HANDLING ENVIRONMENT
Dipl.-Ing. Martin Staden (STN ATLAS Elektronik, Bremen, Germany)
Abstract: The problem is well known to all seafarers. All information presented on shipborne electronic equipment such as ECDIS, radar, echo sounder, speed-log etc. is falsified by environmental effects, inaccuracy of sensors and wrong or outdated database / chart material used. Most seafarers know about this situation, but it has to be assumed that only some of them are aware of the consequences for ship handling in the case of wrong sensor readings, sensor effects under certain conditions or sensor malfunctions, especially within complex integrated bridge environments. A modern navigation / ship handling simulator with sensor simulation capability turns out to be a versatile tool for demonstrating and training the students to recognise and identify misleading sensor effects and errors which may occur on board. This kind of simulator enables the students to learn how to interpret and react to inaccurate and contradictory sensor information.
1. INTRODUCTION
1.1 The Chain of Information and the Possibilities of Error
In a real environment, the ownship's and other ships' position, heading, speed etc. are detected by sensors. Navigation equipment will process, filter and present the information in readable format.
On ships with Electronic Chart Display and Information Systems (ECDIS) the measured sensor data are further processed, converted and linked to each other in a complex manner to form a system-consistent image of the ship's situation, especially when ECDIS and radar video are combined on such a screen.
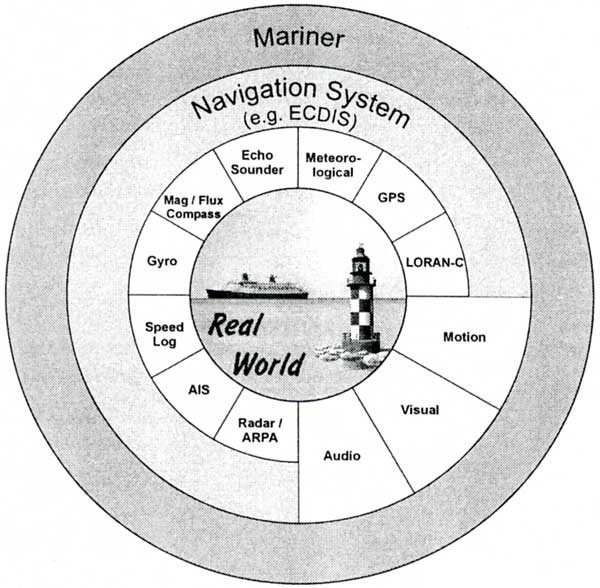
On the basis of this displayed information, and together with the out-of-the-window view, the navigator interprets the situation, makes decisions and takes action to steer the ship on the correct course.
This chain of information from reality to the human perception of reality, i.e. the interpreted reality, is shown in Figure 1.
This paper describes the effects and requirements of navigation sensor simulation rather than the visual, audio and motion simulation, as these items require separate lectures to cover all their related aspects.
The difference between the real world situation and the displayed situation is mostly negligible, and the mariner is able to interpret the situation correctly or within the required range of accuracy.
But along the described chain of information the chance for errors is often underestimated. Even in a navigation system that is working perfectly, the mariner may interpret displayed data wrongly. Under certain operational conditions the values displayed may be misleading, or in case of sensor malfunctions the displayed values are falsified.
Fig.1 The Chain of Information from Reality to Interpreted Reality
According to the International Maritime Organization (IMO) , ECD IS-based navigation systems and automatic track control systems, for example must have built-in tests to detect malfunctions or contradictory information in order to warn the user of a condition that requires attention [1], [3].
This 'system data integrity' topic is currently being addressed by the International Electrotechnical Commission (IEC) Working Group on Integrated Navigation Systems (INS).
However in complex navigation system environments it may be difficult for the mariner to identify the cause of an alarm and to take appropriate action due to complex interdependencies and the profusion of different possible alarms.
Regardless of the human factor in the operation of automated bridge or navigation systems, under certain conditions the built-in tests of the sensors and navigation systems may not detect sensor deviations or malfunctions that can lead to highly dangerous situations for the ship.
Today, large ships have to be steered on narrow and busy shipping routes and they have to approach harbours and channels with very limited space. Here, exact knowledge of sensor behaviour, accuracy and system performance in normal operational and critical situations is essential for the mariner to prevent danger to life, ship and environment.
This fact has already been identified by Rothblum: 'When automated systems designed poorly or misused by under trained or untrained personnel, automated equipment can be a contributing cause to accidents. In a study of 100 marine casualties, inadequate knowledge about equipment was found to be a contributing cause in 35 per cent of the casualties. '[6].
1.2 Sensor Systems on Board Ships
Modern ships are equipped with advanced navigation sensors including backup systems, The following figure shows a sample layout of a navigation sensor configuration on board a ship.
Fig.2 Sample Layout of Navigation Sensor Configuration
The block diagram seems to be simple and easy to understand. However, taking into account the fact that most items of sensor data are related to each other, or rely on each other, the processing of sensor data turns out to be more complex and gives an initial indication of the sensitivity of sensor accuracy and malfunctions for the entire navigation system environment.
Table 1 provides an overview of the dependency of navigation sensor data and consequences in the case of malfunctions.
Table 1 Dependency of Navigation Sensor Data and Consequences in the Case of Malfunctions
| Navigation Sensor |
Possible Equipment Malfunctions |
Affected Equipment or Information and Consequences for
Ship if Malfunction not Noticed |
| Gyro Compass |
The gyro may drift, provide incorrect heading information
or shut down. |
Effects
・Auto-pilot
・Track keeping system
・ARPA target processing
・Radar (north stabilisation)
・Visual bearings
・Set and drift information on INS
・DR position
Possible consequences:
・Grounding
・Off track |
| Speed Log |
The equipment may provide incorrect speed information or may
shut down. |
Effects
・Radar own ship data
・ARPA target information
・Track keeping systems
・Set and drift calculation by INS
・DR positions Possible consequences:
・Grounding
・Damage to ship and berth |
| Auto Pilot |
The equipment may not steer correctly or may shut down. |
Effects:
・Course keeping
Possible consequences:
・Grounding
・Collision |
| GPS |
The GPS may revert to DR mode, provide incorrect or degraded
position information or may shut down. |
Effects:
・Position
・GPS speed made good
・GPS course made good
Possible consequences:
・Grounding |
| Radar |
The radar may provide incorrect information or may shut down. |
Effects:
・Navigation
・Target information
・Collision avoidance
Possible consequences:
・Collision
・Grounding |
| ARPA |
The equipment may provide incorrect target data or may shut
down. |
Effects:
・Target information
Possible consequences:
・Collision, especially in restricted visibility |
| Echo Sounder |
The equipment may provide incorrect depth information or may
shut down. |
Effects:
・Depth information
Possible consequences:
・Grounding |
| ECDIS |
The ECDIS may provide incorrect chart display or incorrect
position, or may shut down. |
Effects:
・Chart information
・Position
・Course made good
・Speed made good
Possible consequences :
・Grounding |
|
In the light of all the effects described, the value of adequate simulation of sensor behaviour and equipment malfunction within Ship Handling and Navigation Simulators is becoming important.
2. HOW TO PROVIDE ADEQUATE SENSOR SIMULATION
2.1 Principles of Sensor Simulation
Ignoring the visual, audio and motion effects, the human perception of reality provided by navigation sensors is influenced by the following factors:
・Sensor behaviour
・Sensor malfunctions
・Operation of navigation sensors
・Misinterpretation of displayed data
To cover all of the above-mentioned factors, adequate sensor simulation must provide at least the following:
・Mathematical models describing the behaviour of navigation sensors and their function
・Faithful simulation of navigation sensor malfunctions
・Realistic Human / Machine Interface (HMI) for navigation sensor
・Sensor system configuration, e.g. location of antennas and sensors
Figure 3 shows a basic block diagram of a sensor simulation module.
Fig.3 Basic Block Diagram of Sensor Simulation
All items of data which are provided by sensors in a real environment are available in a simulator environment. The position, heading, course and speed data etc. are calculated by the ownship and traffic ship models and can be treated as absolutely correct data. These data are called 'System Data', and they represent the real world in a simulator environment.
The sensor simulation must simulate the reverse functionality of a real navigation sensor. For example, in the case of gyro sensor simulation the real (system) heading is already known, but the sensor simulation must reverse-calculate the displayed heading taking into account all aspects of gyro behaviour and failures.
The 'Sensor Model' part of the sensor simulation converts the system data into sensor data by taking into account the sensor's typical behaviour, deviations and physical effects such as noise, satellite availability, sensor drift etc.
The 'Sensor Logic' part simulates the function of the navigation sensor, for example selecting different operation modes or switching between different display modes.
The 'Human / Machine Interface' provides the graphical representation of the sensor's operating panel.
2.2 Mathematical Models for Sensor Simulation
The mathematical models for the sensor simulation process must closely simulate the behaviour of the sensor in the various conditions which are relevant for further processing.
Simulating sensor behaviours by just adding a typical noise spectrum to the system value is not sufficient and will prevent sophisticated and realistic representation of sensor behaviour under certain conditions, e.g. tracking, filter effects on manoeuvres, etc.
Furthermore, the function of the navigation sensor itself must be simulated as completely and precisely as possible. This allows the use of the navigation sensor in all possible operational states, i.e. including wrong settings. The simulation of the navigation sensor functionality is the basis for realistic navigation and equipment training in a simulator. Incomplete or imprecise simulation of the functionality will increase the gap between reality and perception of reality so that it becomes wider than on board. A simulator must neither degrade nor improve the difference between reality and the perception of reality.
2.3 Simulation of Sensor Malfunctions
Besides simulating the normal behaviour of a navigation sensor, realistic simulation of malfunctions and failures should be implemented to generate realistic alarm situations. Furthermore drifting sensor functions must be implemented. These malfunctions and effects are highly dangerous, because they may not generate alarm messages on navigation systems and have to be detected by the mariner or student on the basis of plausibility checks.
For example, a damaged sensor of a dual axis speed log may provide a degraded speed component value which results in wrong ARPA target information and failures in using the track-keeping system.
A drifting gyro compass will affect almost the entire navigation equipment.
Table 2 shows some navigation sensor effects which should be included in a sensor simulation. The third column lists some possible causes of malfunctions as they may appear in the real world. These causes of malfunctions can be grouped together to form the required sensor malfunctions which should be included in a sensor simulation.
2.4 Human / Machine Interface
Most of the navigation sensor systems on board the ship have a Human / Machine Interface, such as a GPS and LORAN-C navigation system or the echo sounder and speed log instruments.
In conjunction with the available functionality of the navigation sensor, the HMI's have to emulate real equipment as accurately as possible in order to provide all possible operational settings and displays. This will provide the chance for operation errors and thus the ability to simulate the related effects.
2.5 Sensor System Configuration
As an additional factor, the sensor data displayed may be confusing for the mariner or student because such data apparently provide inconsistent or misleading information.
The apparently inconsistent display of information can be traced back to real sensor effects, malfunctions, operator errors or the inability of the mariner or student to interpret and understand the interdependencies of the navigation sys tem environment on board the ship.
For a realistic interpretation of displayed navigation data, knowledge of the ship 's navigation system configuration, especially the reference systems, is essential.
Therefore, the configuration of ship sensor and navigation equipment must be simulated and must be configurable by the simulator user. In particular, the location of the individual sensors should be configurable in order to simulate the effect of sensor data at different sensor locations and the effect of wrong configuration set-ups of a navigation sensor.
Table 2 Sensor Effects and Cause of Malfunctions versus Required Sensor Malfunctions
| Navigation Sensor |
Sensor Effects |
Possible Cause of Malfunction in Real World |
Required Sensor Malfunction |
| Gyro Compass |
・Drift over time (approx. 0.3 .. 0.5 deg/h)
・Speed error depending on position, course and speed
・Position error above approx. 70 deg. Lat.
・Dynamic errors depending on type of gyro |
・Power failure
・Equipment faults
・Power frequency shift
・Heating failure
・Ship's pitch
・Wrong speed input |
・Breakdown
・Speed correction breakdown
・Offset error (phase error)
・Drifting gyro |
| Flux Compass |
・Variation depending on position
・Deviation depending on ship magnetism |
・Power failure |
・Breakdown |
| Doppler Speed-Log |
・Drift error (negligible)
・Proportional error (compensated)
・Statistical error
・Current displacement (WT mode only)
・Pitch, roll, heave (depending on configuration / type of Doppler speed log)
・Aeration effect |
・Power failure
・Equipment faults
・Transducer breakdown due to grounding
・Transducer degradation due to:
- Sensor leakage
- Dirt
- Bubbles
- Sea state
- Wind
- Traffic ship noise
- Engine noise
- Thruster noise |
・Breakdown
・Speed offset
・Offset transversal
・Offset longitudinal
・Noise transversal
・Noise longitudinal
・Aeration effect |
| GPS / DGPS |
Position estimation taking into account:
・Satellite availability
・Satellite visibility
・Multipath effect
・Geodetic datum
・Op-Mode D/GPS
・C/A or P Code
・Pitch, roll
・Filter effects |
・Power failure
・Equipment faults
・Satellite failures
・Reflections
・Time delays
・Atmospheric interference
・Obstruction of antenna's view of the satellites |
・Breakdown
・Multipath error
・Satellite inoperative
・Elevation mask
・Accuracy degradation
・Selected Availability (SA) status |
| LORAN-C |
・Hyperbola spreading
・Propagation effects
・Geometry effects
・Geodetic datum |
・Power failure
・Equipment faults
・Transmitter errors |
・Breakdown
・Antenna error
・Time error |
| Echo Sounder |
・Salinity effect
・Temperature
・Aeration effect |
・Power failure
・Equipment faults
・Transducer breakdown due to grounding
・Transducer degradation due to:
- Sensor leakage
- Dirt
- Bubbles
- Sea state
- Wind
- Traffic ship noise
- Engine noise
- Thruster noise |
・Breakdown
・Offset
・Propagation error due to sound velocity changes |
| Radar |
・Horizon effect
・Blind sector effect
・Sea clutter
・Rain clutter
・Radar frequency
・Side lobe effect
・Multiple reflections
・Mirror reflections
・Etc. |
・Power failure
・Equipment faults
・Situation-related effects |
・Interference
・Echo fading
・Side lobe effect
・Multiple reflections
・Mirror reflections
・Breakdown
・Trigger breakdown
・Head marker breakdown |
|
|