|
FULL-SCALE ANCHORHANDLING SIMULATOR FOR ASSESSMENT AND TRAINING IN OFFSHORE OPERATIONS.
Norvald Kjerstad (Aalesund University College, Norway)
Ove Bjoerneseth (Aalesund University College, Norway)
Abstract: Rig-move and anchorhandling (AH) operations are among the most complex and dangerous operations done by offshore vessels on the continental shelf. Steadily increasing water depth and operations under more extreme conditions are challenging the vessels and their crews. After many fatal accidents the Norwegian shipowners and oil companies now look for a best practice to improve safety under these operations. Part of this philosophy is to use simulators for training AH-crews and during planning of operations. Due to long experience in maritime simulation and dynamic positioning (DP) training the Aalesund University College (AUC) has been chosen as a natural partner in implementation and commissioning of such a simulator. AUC did the first pre-project in 1997, and has in 2002 finalized the project specification and started the building of the new full mission AH-simulator. The simulator will be a copy of the most modern bridges delivered from Rolls-Royce to Farstad Shipping, and be the first simulator of this type and complexity in the world. Main features will be:
・Mathematical ship-model of UT-722 design (M/V Far Scout).
・Mathematical model of different hydraulic winch configurations, with up to 500 ton pull.
・Mathematical model of different anchor types, anchor lines and seafloor characteristics.
・Visualization, interface and animation of deck equipment, such as winches, tow pins, shark yaw and quarter pins.
・Geographical database including all relevant features on the Troll Field (more than 300m water depth).
・Full scale bridge with all relevant navigation-, communication-, manoeuvring and winch controls.
・R&D capability for flexible extension of models, areas and operations.
This paper will present the technological innovation and challenges, as well as the training and scenario issues related to the new AH-simulator.
1. INTRODUCTION / BACKGROUND
Since the offshore industry became a more and more important arena for sailors from the west coast of Norway, the Aalesund University College (AUC) started tailoring of relevant training programs and educations for this group in the early nineties. Building of a new shiphandling simulator and development of a new simulator concept for Dynamic Positionoing (DP) training was part of this commitment. Already during the planning process of AUC's shiphandling simulator in 1997, the question of an anchorhandling (AH) simulator arose. Due to faculty capacity problems and need for consolidation the issue couldn't be realized at that time. In 1999 AUC was appointed as a hub for maritime education in Norway, with special responsibility for near coast and offshore operations. Further development was therefore invited for by the Ministry of Research and Education. The fact that these areas of operation also were affected with high risk and serious accidents lead to much support from the industry as well. Two major development projects were therefore reconsidered and started. The first was the High Speed Craft (HSC) simulator [1] and the second was a new full mission AH-simulator. AH-vessels are at the moment doing extremely complex and costly rig moves in water depths of more than 2000 m, and the vessel have machinery giving them a bollard pull of around 300 tons. The winches often have a capacity of 600 tons or more. Most of the modern AH-vessels in the world as well as the winch systems are designed and/or build in the Aalesund region (fig. 1).
Fig. 1 |
Far Scout, operated by Farstad Shipping, is the major model for the AH-simulator. |
Because of the complexity of the AH operation and the high cost of the vessels and rigs involved, we believe that a dedicated simulator system will maintain and improve safety in such operations. A simulator will also be an important element in R&D. as well as the operators' commitments to ISM [2] and Best Practice [3] regimes. This paper will present the State of the Art AH- simulator currently under development and commissioning at AUC. The challenges and necessary technological compromises will also be discussed. According to present plans the simulator will be ready for testing during the fall of 2003. Even if the integrated DP system is an important part of the AH simulator the description of training concept related specific to the integration of DP will be outside the scope of this paper.
1.1 Introductory Anchor Handling
Many floating offshore units, such as drilling rigs, production ships and pipe barges are normally kept in position or on track by means of anchors. When these units need to change location the anchors have to be moved by means of specialized tugs like the AH vessels (fig.1) [4, 5]. The anchor systems consist often of eight mooring lines running in catenary shape from the rig to the anchor (fig. 2). Often 2 - 4 vessels will cooperate in the operation, which briefly can be outlined by:
1) The vessel positions itself close to the rig and take the chaser wire onboard. The chaser ring is arranged around the individual mooring lines.
2) When paying out chaser wire the vessel sails toward the expected anchor position. The chaser ring will than end on the stock of the anchor.
3) When the chaser ring is on the anchor can be broken loose from the seabed. This operation can be very difficult and will often require extreme pull from the vessel and the winch.
4) In a joint operation with the winch operators on the rig the anchor now can be brought back to the rig or to the new anchor location. The anchor can be taken on deck or hang in the water, close to the sea surface.
In case of barge handling the AH vessel will pick up a buoy connected to the anchor and will consequently not need to use chaser to pick up the anchor.
2. TRAINING OBJECTIVES AND CERTIFICATION
Based on more than 20 years of experience with navigation and shiphandling simulators we believe that the new AH simulator will be an important tool for training of navigators and winch operators (normally engineers), as well as the deck crew. It is therefore important that complete AH handling operations and planning can be undertaken on the simulator. This will also include testing and validation of safety procedures and "best practice", which will include all crew members as well as management.
Fig. 2 Semi-submersible rig with mooring lines and AH vessel.
How responsibility is shared during AH operations can vary quite a bit, but the following can be considered as most relevant:
・The Navigator is head of the deck crew, and responsible for the watch. This includes the responsibility for the whole operation, as well as manoeuvring, radio communication and navigation watch keeping [6]. On most modern AH vessels the navigator will also be the DP operator. The navigator can be the captain, the chief officer or the first officer.
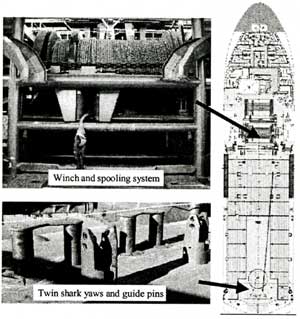
・The winch operator will normally be an engineer who is carrying out orders given by the navigator. This includes operation of winch control, spooling device, shark yaws, tow pins and quarter/guide pins (fig. 3). The winch operator will also from the winch control station monitor the engine systems.
・The deck crew will carry out orders from the navigator. This includes connection and disconnection of wires, chains and other AH equipment.
・The surveyor is the link between the winch crew on the rig and the AH handling vessel. The surveyor is responsible for the positioning of the rig and the location of the anchors. Communication between the navigator and the surveyor is carried out by means of radio communication and the telemetric survey system. The surveyor is normally a marine geodesist hired by the rig contractor for the job.
Before the simulator concept was finally decided, a group of experienced partners from the industry was gathered to agree on the training objectives and content of future AH training courses. This included navigators and engineers from Farstad Shipping, engineers from winch producer Rolls-Royce Marine (RR), marine supervisors from Norsk Hydro and instructors from AUC. The group agreed on a two stage process, basic and advanced training.
Fig. 3 |
Anchor handling equipment and deck layout on Far Scout (UT-722). |
2.1 Basic Training
The objective of the Anchor Handling Course is to familiarise and train the participant's ability to plan, prepare and carry out basic anchor handling operations under normal condition.
The course consists of theoretical lessons on anchor handling and equipment related to the operation, familiarisation with the bridge equipment and layout and practical simulator exercises on simple operations.
The practical exercises will take place in the simulator designed as AH vessel aft bridge.
Theory:
Aim: To give an understanding of the necessity of a good relation between the human - and technical factors, as well as give knowledge and understanding of:
・Deck Lay-out and equipment, positioning and function.
Type, characteristic and use of [7]:
○ Anchors, chasers and grapnels
○ Wire and chains
○ Shackles, fittings and connections.
○ Shark Jaws and guide pins
Condition control and maintenance of:
○ Wire and chains
○ Shackles, fittings and connections.
・Anchor Handling winch and other hydraulic equipment.
Characteristic and use of electric and hydraulic winches:
○ Winch construction and functionality
○ Hydraulic and electrical motors
○ Couplings
○ Static and dynamic braking
○ Spooling device
○ Chain wheels
○ Control functions and operation
○ Winch capacity
○ Process monitoring
○ Winch Control
○ Water brakes
○ Condition control and maintenance of winches and other hydraulic equipment
・Anchor Handling Operations.
Achieve understanding of principles and operation regarding:
○ Purpose and principles of relevant anchor systems
○ Principles of anchor handling of relevant anchor systems
○ Safety aspect in connection with anchor handling with regard to personnel
・Planning Operations.
Carry out the necessary calculations planning an anchor handling operation considering [8]:
○ The weight of the anchor system an rigging
○ Drum capacity
○ Chain volume
○ Bollard pull
○ Winch load
○ Dynamic forces
○ Safety margins
○ Calculation of maximum permitted values of work load
○ Rig set up
Form:
Classroom instruction combined with syndicate work. Simulator for basic training in planning and execution of anchor handling operations. The role of the participants will during the exercises change between anchor handling team and observer team. Course duration is anticipated to 4 - 5 days (4 - 6 participants)
2.2 Advanced training
The purpose of the simulator course is to exercise and illustrate Anchor Handling operations in theory and practice. In as realistic conditions as possible the crew will carry out a number of difficult exercises in the simulator. The scenarios will, based upon safety aspects and company procedures, be complicated in several ways. The crew will be exposed to stressing factors such as wind, current time pressure, internal and external communication, handle- and machinery breakdown, etc.
The purpose of the whole training program is to reduce the number of accidents due to human errors and thus increase safety at sea It is important to emphasise that the purpose of the course is to increase safety by focusing on the human factors elements, procedures and ship handling. The individual evaluation will be used only as a part of the total impression of the crew's performance and will eventually form the basis for changes in training and procedures.
In order to carry out the course in a positive atmosphere it is important that the participants see him/herself as an element in a total evaluation of a team and that this evaluation is understood as a tool for increasing safety at sea.
To fulfil these objectives the simulator should provide realistic performance related to the following operations:
・Planning of AH operation and evaluate loads, dynamic forces and safety margins in cooperation with rig.
・Deployment of permanent chaser and lifting of anchor.
○ Prepare, connect and deploy chaser pennant and working wire.
○ Use of radarpositioning and survey system.
○ Course and heading to anchor position
○ Influence of wind, waves and current.
○ Different anchors, bottom type and time dependent recovery.
○ Detect chaser position on chain and anchor.
○ Breaking of anchor in cooperation with rig.
○ Evaluation of anchor status, based on the tension on the winch system.
・Wire spooling on the winch drums.
○ Wire position related to stem roller and guide pins.
○ Precautions when wire bumps enter the stem roller.
○ Operation of spooling transmission before shackles enter the winch drum.
○ Spooling by means of tugger winch.
○ Evaluate pulling force related to actual drum radius, including consideration of winch change.
○ Operation of work wire.
・Secure wire and chain in shark jaw.
○ Visual evaluation of wire to decide securing in different type of shark jaws.
○ Evaluate if shackle has to be changed for optimum performance of shark yaw.
○ Visual evaluation to decide proper securing in shark yaw.
・Anchor on deck and return to rig.
○ Evaluate anchor position in water based on spooling monitor.
○ Evaluate required direction of different anchors (Stevpris, Bruce and Stevin) before decking.
○ Manoeuvre for turning of anchor.
○ Bring different anchors on deck and secure them.
○ Bring back the anchor to the rig.
・Deployment of anchor.
○ Deploy different type of anchors (Stevpris, Bruce and Stevin).
○ Manoeuvre ship or operate tugger winch to position chain / wire between guide pins.
・Bring anchor to position - permanent chaser.
○ Connect pennant and working wire, and maintain sufficient tension on pennant wire.
○ Heave and secure anchor close to stern roller in cooperation with rig.
○ Sail to new position, calculating wind, current and waves, while rig is paying out wire.
○ Prepare and deploy anchor with correct tension in the right position.
○ Loosen and return chaser to rig by means of work winch.
○ Evaluate and stretch curves on the anchor line in cooperation with the rig.
・Deployment of prelaid anchors.
・Use of DP system in AH operations and operations close to rig. Own training regime will be developed in accordance to Norwegian Maritime Directorate regulations.
・Winch computer.
○ Programming, monitoring and operation of winch computer and relevant control levers.
Simulator:
Aim: Extensive training in planning and execution of anchor handling operations where the equipment is used to the maximum limits. To give an understanding of the necessity of a good relation between human and technical factors. To obtain and exchange experiences between the participants.
The exercises shall include elements of lessons learned from earlier accidents onboard the vessels during A/H operations.
・Insufficient knowledge to the A/H equipment.
・Insufficient understanding of the forces on the A/H equipment.
・Lack of experience.
・Insufficient understanding of the function and use of the specific equipment.
・Poor planning and risk analysis.
・Lack of risk analysis and decision-making.
・Poor communication between winch operator and navigator.
・Poor team work.
・Negligence and procedure errors.
・Insufficient ability cope stress in a stressful environment.
・Working environment/workload.
・Design errors.
Form:
The training will apart from the planning take place in the simulator. The role of the participants will during the exercises change between anchor handling team and observer team. Course duration is anticipated to 3 - 4 days with 4 - 6 participants.
Apart from the mentioned working group of expert two groups of students were involved. One of the groups were nautical students doing their B.Sc. thesis on AH. They made an excellent work, collecting and systemizing material for planning and development of AH courses and simulator development [9]. The other group was computer science students doing their thesis in computer graphics. This group made an excellent job in modelling simulator models of winch system and deck equipment on an AH vessel, included different simulator models for surveillance cameras on the AH bridge [10] (fig. 4). One of the nautical students continued the work after he started as a navigator on one of the AH vessels from Farstad Shipping.
Fig. 4 |
Animated images of AH vessel Far Scout and different deck equipment. |
|