|
2.5 Modelling of Own Ships dynamic e.g. for new propulsion & steering systems and Environmental elements
2.5.1 Mathematical Model
The mathematical model of own ships' motion within simulators is designed for modelling the controlled motion of marine vessels. A mathematical model is a program, which enables the vessel's position in space to be determined in real-time depending on the setting of the bridge, engine, and other controls and the environmental factors affecting the vessel such as wind, current, sea, tug forces, and berthing forces.
A lot of achievements in hydrodynamics and the modelling techniques have made available several new features covering a great variety of hydrodynamic effects and ship type specific aspects, such as:
- Ship types from large VLCC to small boats; seagoing ships an inland waterway vessels; Displacement vessels (Mono hulls, catamarans), high-speed hydrofoils up to wing-in-ground vessels,
- Towing boats/Tugs and pushing boats,
- High speed cruising and slow speed manoeuvrability,
- Towing and mooring facilities,
- Hydrodynamic effects of entering/leaving locks
- Open waters and restricted canals, berthing and banking effects,
- Grounding effects incorporating bottom friction and buoyancy.
Some of these elements are addressed in several papers of this MASIM03 conference.
2.5.2 New propulsion and steering elements
Apart of the aspects above some emphasis will be put onto new propulsion and steering systems like Azimuth propellers. Several types of these new propulsion and steering systems have been developed over the last years. Today, they are increasingly used for training and research in simulators. Crucial elements for the modelling of this ship types are:
- These propulsion and steering systems are much more complicated from the hydrodynamic point of view and some papers of this conference are specifically dealing with this matter (e.g, [5] to [7]).
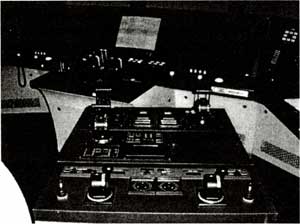
- For flexible configuration the actuators/handles for these systems can be effectively incorporated in changeable racks or consoles to be moved onto the bridge for specific training purposes (Figure 10). From technology point of view the interfacing is not simple because all these different handles for specific propulsion systems have to be addressed and correctly connected to the parameters of the databases. This can be done comfortably e.g. via Interbus connection.
2.5.3 Environmental issues
Another aspect for new challenges is the modelling of wave effects coming along with the 3-D-waves visualisation of heavy sea state (e.g. [8] to [11]). Whereas ship models in earlier simulators have been based on more simplified harmonic equations to "fake" rolling and pitching motion, they now have to cope with more realistic motion patterns in sea state, relying on hydrodynamic relations: This is important when two ships are close together, e.g. for towing and piloting manoeuvres, the ships have to move in effect of their individual position to the visible waves specifically. Furthermore, these improvements should also make it capable to respond to training needs emerging in the aftermath of severe damages of ships through parametric rolling.
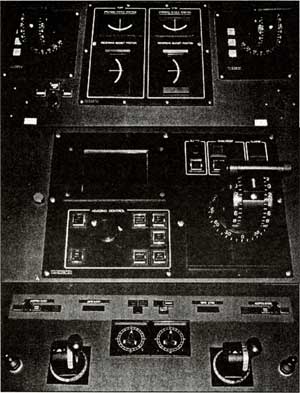
Figure 10: |
Top - Consoles for multiple propulsion systems (foreground) and conventional manoeuvring console (background) at MSCW; Bottom - Detailed handles of multiple propulsion console: Azimuth Thrusters (top), KAMEWA Joystick (middle) and Waterjet-Handles (bottom) |
|