|
(2)水深データ処理
(1)ピングデータ編集
SeaBat8101水深データについて、ピング毎に表2に示すピングデータ処理を実施した。
表2. 名古屋港実験のSeaBat8101水深データの処理内容
| 項目 |
処理内容 |
| SeaBat8101測深機の取付方法 |
船底取付 |
| 動揺センサー |
POS/MV |
| 処理 |
音速補正 |
実施 |
| 潮高補正 |
実施 |
| ノイズ除去 |
実施 |
| バイアス補正 |
Roll 0.0deg
Pitch 0.4deg
Yow -3.8deg
Position
Latency 0.0sec |
| 動揺補正 |
Roll |
各ビームの受信時 |
| Pitch |
送信時 |
| Heave |
送信時と各ビームの受信時の平均値 |
|
(2)ロバスト推定による度数分布の作成
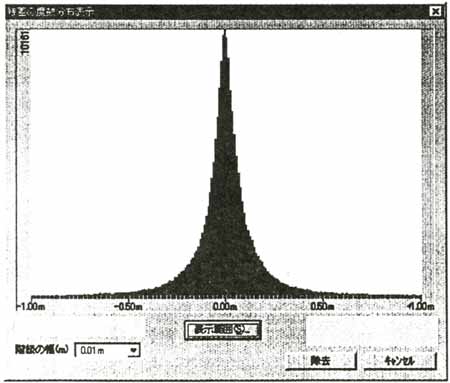
ロバスト推定法は、海底面を3次元空間における2次曲面方程式にモデル化し、推定したモデルから外れた水深データを定量的に分別する方法である。本研究では、ターゲットの底面の一辺の長さの約2倍である0.1秒(約3m)をモデル化する海底面の範囲とした。ロバスト推定法によるモデル面と水深データとの残差を度数分布として表したものが、図13である。横軸はモデルとの差、縦軸は度数分布の階級の幅に入る水深データの数、階級の幅は、0.01mである。この度数分布より、対象海域が水深7mで平坦な海域であることから、モデル面を基準として、±50cm以上を除去し、信頼性のあるデータのみを使用した。
図13. モデル面と水深データの残差の度数分布
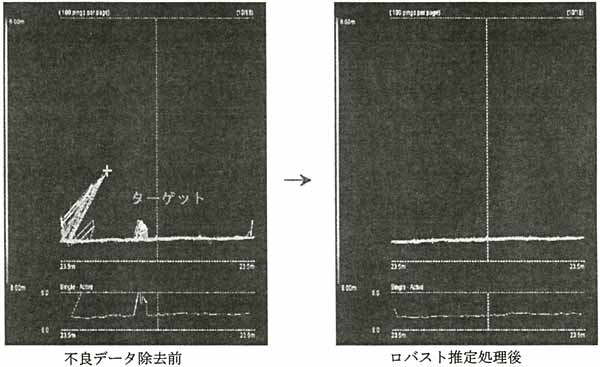
ロバスト推定法による処理前と処理後のピングデータを図14に示す。図より、処理前に見えていたスパイク状のデータ及びターゲットが、処理後の表示では除去されている。本研究ではこれを利用して、スパイク状のデータとターゲットの除去を行い、補間前の地形図を作成した。
図14. ピングデータ表示
(3)ターゲットの判別及び復元
水深データの補間後の地形図に、ターゲットの水深データを重ね合わせる必要がある。ターゲットの水深データの抽出は、2測線のデータを用いたロバスト推定法により、重複する2測線から重なり合う部分を抽出した上で、各々の測線から海底面モデルを作成し、片側測線だけでは不良データと判別していた水深データを求めるべき良好データとして判別する。水深データ重複部分の比較を行う条件は、位置の差を水深10mにおけるセンタービームの照射覆域の一辺の長さの約2倍(0.5m)とし、水深値の差をSeaBat8101の分解能の2倍をとり、±10cm以内とした。
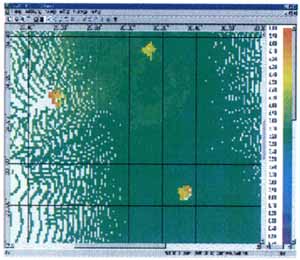
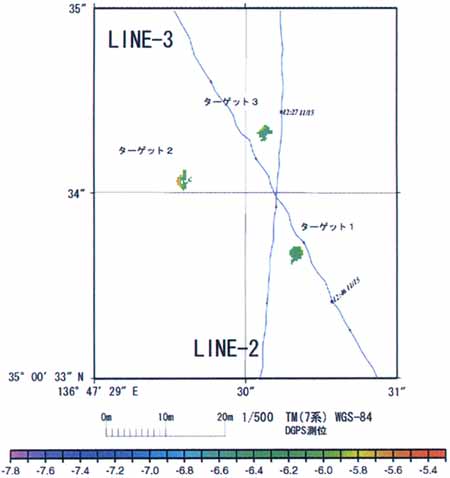
ターゲットの判別及び復元後の地形図及び同図から読み取った各ターゲットの形状を図15に示す。図14では、不良データと判定されていたターゲットが、ターゲットの判別及び復元によって、良好データとして復元されており、ターゲット及びターゲット上に設置した箱の形状を読み取ることができる。
図15. ターゲット復元後の地形図(上)とターゲットを捉えた測線図(下)
メッシュサイズ:30cm
カラーインターバル:10cm
DGPS測位 |
(4)ターゲットデータの抽出
スパイク状のデータ及びターゲット除去後の地形図と、ターゲットの判別及び復元後の地形図との差から、ターゲットの水深データを抽出した。抽出結果であるターゲットのみの地形図を図16に示す。
図16. ターゲットの抽出結果
|