|
NO.8の論文では、SeaMARCIIよりも先に開発されたGLORIAIIに、送受波器を追加し、音波の到来方向を計測できるように改良した例を紹介している。1990年代以降に開発されたサイドスキャンソナーは、インターフェロメトリック機能を搭載し、音波の到来方向を計測できるようになっている。これらのシステムは、原理的には音響画像データを到来方向順に並べ直すことにより、地形歪み除去が可能であるが、未だそのような試みを行った報告はなされていない。
これは位相計測において、同時刻に多方向から反射信号が入射した場合、精度が劣化することが原因であると考えられる。したがって結果的に、SEA BEAMなどのマルチナロービームに比べて絶対精度が劣るとされている。現在、これを改善するため、3本のハイドロフォンをL字型に2次元配列したインターフェロメトリック・サイドスキャンソナーの開発を浅田他(2003)が行っている。
また浅海用のサイドスキャンソナーは、長い間、インターフェロメトリック機能を搭載したシステムが開発されていなかったが、3年ほど前からKLEIN社の5000シリーズにオプションとして搭載できるようになっている。
NO.13は、「かいこう」に搭載されたサイドスキャンソナーを用いた対馬丸の探索を述べたものである。本論文では、音響画像上に見られる沈船の影の長さと曳航速度から、船の高さ(15m前後)と長さ(130-140m)を算出し、最終的に沈船が対馬丸であることを特徴付けている。
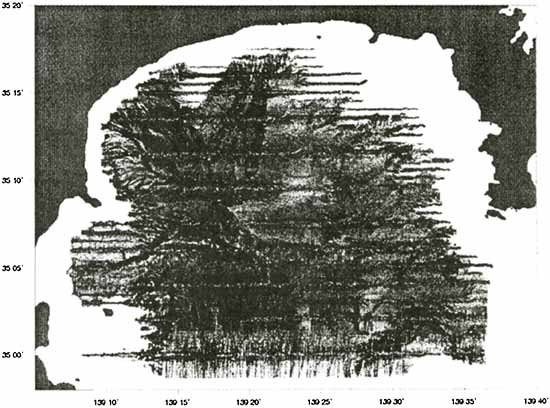
NO.14とNO.15は、SEA BEAM 2000の音響画像データを紹介している。SEA BEAM 2000は、海底エコーパルスを時間と到来方向を計測し、到来方向順に音響画像データを並べ直すため、収録されるデータには地形歪みが含まれていない。音響画像データの収録は、SEA BEAMシリーズでは、SEA BEAM 2000から実施されており、SEA BEAM 2112、SEA BEAM 2120に継承されている。いずれも片側1,024個の音響画像データを収録する。図6はSEA BEAM 2000で得られた音響画像データを使用して画像化された相模湾の海底音響画像である。
図6. SEA BEAM 2000の海底音響画像
以上の結果から数多くの論文で、収録した音響画像データに、地形歪みが含まれていることが述べられているものの、地形歪み除去を試みている論文は、1件のみである。
この理由は、サイドスキャンソナーが使用されるようになった頃の調査機器の性能の違いからも読み取ることができる。表1は、1980年代と現在のサイドスキャンソナー及びマルチナロービーム測深機の仕様を比較したものである。測位精度の精度についても示した。
表1. 現在と1980年代の調査機器及びGPSの性能比較
| |
現在 |
1980年代 |
サイドスキャンソナー
音響画像データの分解能
音響画像データ数
水深データ数 |
ANKOU (9/10kHz)
16ビット
4,096個(片側)
4,096個(片側) |
SeaMARCII/IZANAGI (11/12kHz)
8ビット
1,024個(片側)
256個(片側) |
マルチナロービーム測深機
ビーム幅(フットプリント)
ビーム数
音響画像データ作成機能 |
SEA BEAM 2120
1.0×1.0度
151本
有 |
SEA BEAM
2.0×2.0度
16本
無 |
| 測位精度 |
GPS(単独測位):数十m
Selective Availabilityの廃止後 |
NNSSまたはロランC: 数百m |
|
SeaMARCIIの登場以来、地形歪みによる影響が説明されながらも、その補正が行われなかった理由として、SeaMARCIIの片側1,024個の音響画像データに対して、同時に収録される水深データが256個と少ないことが挙げられる。他の機器で得られた水深データで補間する方法も考えられたが、当時のマルチナロービーム測深機であるSEA BEAMが16本のビームと少ない上に、当時の測位精度で数百mの誤差が生じていたため、精度の高い地形歪み除去が不可能であった。
ところが近年になって、ANKOUのように、4,096個の音響画像データそれぞれについて、水深値が算出できるようになり、またGPSの精度を意図的に下げていたSAの廃止から測位精度が飛躍的に向上したため、精度の高い地形歪み除去の可能性が生まれてきた。
(2)地形歪み除去処理プログラム開発
収集した資料を検討した上で、平成14年度の研究開発により決定した地形歪み除去方法を再検討し、地形歪み除去プログラムの開発を行った。
サイドスキャンソナー及び本研究で使用するSeaBat8101も、地形歪みの起因が使用する送受波器そのもののためではなく、海底地形の変化によるものであるため、水深データを用いた地形歪み除去の方法もNO.7の論文と共通である。
また本研究で使用するSeaBat8101も水深データの数が、音響画像データに比べて圧倒的に少ないため、他の測線のデータで補う、あるいはデータの補間を行う必要がある。さらに本研究では、平成14年度に実施した名古屋港実験において、海底面に人工物(ターゲット)を設置して、データの収集を行ったため、この人工物を加味した水深データの処理方法について検討した。
(1)名古屋港実験内容
平成14年11月、名古屋港においてSeaBat8101のデータ収集を実施した。本実験の目的は、既知のターゲットを海底面に設置し、SeaBat8101のデータ収集を行うことにより、画像処理法及び地形歪み除去手法の確立、並びに得られた地形歪み除去画像の評価を行うことである。
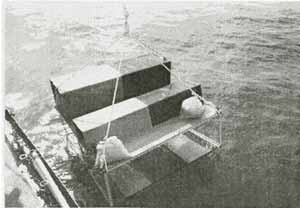
使用したターゲット(写真1)は、L字型のアングルを枠(1.8×1.8×0.6m)として、上面にベニア板を設置したものである。上面には同じくベニア板で作成した箱を設置した。箱の高さはSeaBat8101のサンプリング間隔(1/14205秒)を考慮し、その分解能(5cm)の2倍から10倍とした。また散乱強度を増加させるため、ビニール製のシートを上面に敷いた。水深約10mの底質が泥質の場所を選定し、ターゲット3式を海底に設置後、データの収集を行った。各ターゲットの寸法を図7に示す。
| (1.8×1.8×0.6mのフレーム製台の上にベニア板を敷き、高さ50cm及び30cmの箱を設置 |
図7. 各ターゲットの寸法
図8. 本研究の流れ
|