|
2.4.4 デジタル画像処理方法の検討
(1)デジタル幾何補正画像処理プログラムの仕様
表13. デジタル幾何補正画像処理プログラムの仕様
| 項目 |
内容 |
| 入力ファイル |
海底面画像データファイル |
| 図法 |
メルカトール図法 |
原点緯度経度値を入力。 |
| TM図法 |
0〜19系。0系は任意。 |
| UTM図法 |
1〜60zone。 |
| 縮尺 |
1/500〜1/200000。 |
| 画像出力解像度(dpi) |
150、180、300、600、1200から選択 |
|
送受波器の動揺及び送受信ビーム幅を考慮したデジタル幾何補正画像処理プログラムの仕様を表13に示す。海底面画像データファイル作成プログラムで抽出した海底面画像データファイルを入力し、メルカトール、TM、UTM図法に投影、描画させるものである。
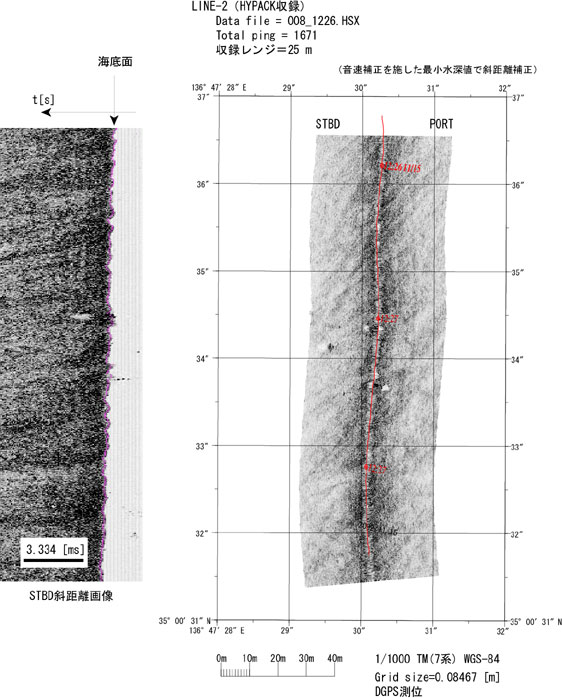
本研究では、SeaBat8101の解像度5cmを最大限に有効とするために、1/500スケールについてはグリッドサイズを4.233cmとした。また1/1000スケールについては、8.467cmとした。
(2)音響画像処理
(a)名古屋港音響画像
本プログラムを用いてデジタル画像処理を実施した。名古屋港実験でターゲットを捉えた測線を図73に示す。また画像処理結果を図74〜86に示す。それぞれの測線において、HYPACK収録及び別収録のデータ収録装置で得られた海底面画像データを用いて音響画像を作成した。
図73. ターゲットを捉えた測線図
| (拡大画面:133KB) |
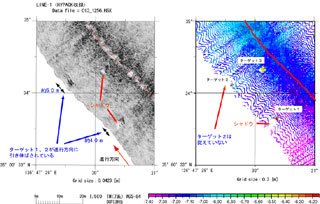 |
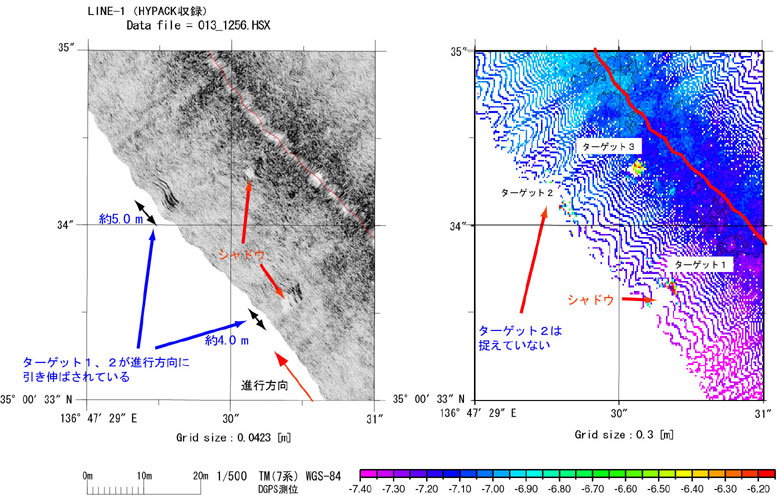
図74. 名古屋港LINE-1の拡大画像(HYPACK収録)
LINE-1は航跡の蛇行に加えてロールの大きな変化により、水深のビーム中心軸の変化が顕著に表れた測線である。したがって他の測線の水深図よりもターゲットの形状を把握することが難しい。またロール変化の影響により、入射補角が40度を超える外側ビームによって計測された水深値の精度劣化が見られたため、手作業によって削除した結果、ターゲット2を捉えることができなかった。
名古屋港実験の海底面画像データは、探査幅が水深の探査幅に比べて狭くなるが、外側ビームの水深データを削除したため、結果として海底面画像データの探査幅の方が広くなり、ターゲット2を捉えることができた。シャドウはターゲット1、3共に、水深及び音響画像図に表れている。また音響画像には、送受信ビームの拡がりにより、ターゲット1、2が進行方向に引き伸ばされて画像化されている。
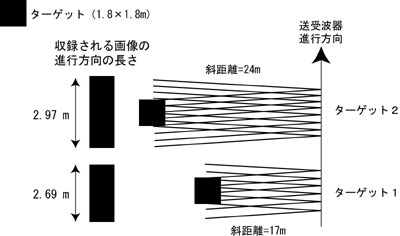
図75. 送受信ビームの拡がりによる画像の歪み
ターゲット1、2の送受信ビームの拡がりによる画像の歪みの概念図を図75に示す。送受波器位置から斜距離が短いターゲット1は、ターゲット2に比べて歪みが小さい。
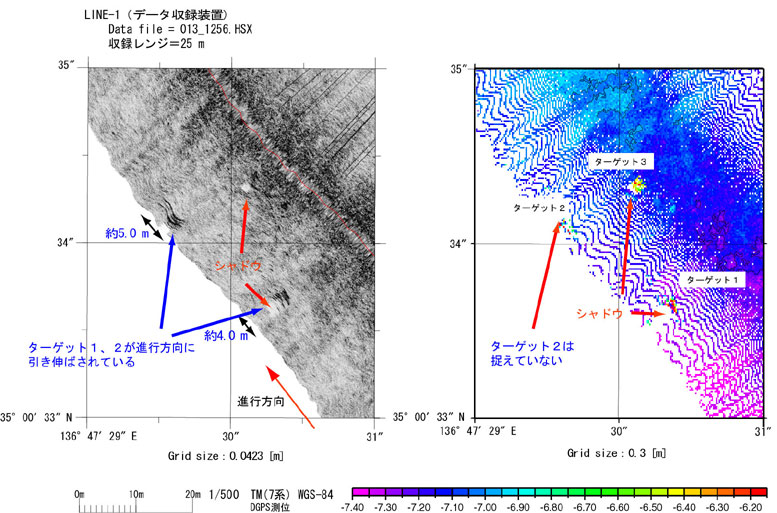
データ収録装置で得られた海底面画像データのLINE-1の拡大音響画像を図76に示す。データ収録装置で収録する海底面画像データは、各海底面画像データを2バイトで収録するために、1バイトのHYPACK収録に比べて、データ収録上のダイナミックレンジが広いことが特徴である.
| (拡大画面:133KB) |
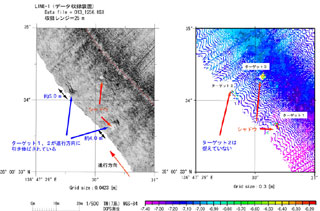 |
図76. 名古屋港LINE-1の拡大画像(データ収録装置)
| (拡大画面:81KB) |
 |
図77. 名古屋港LINE-2の音響画像(HYPACK収録)
|